
-
September 25, 2020
PacTrans Technology Transfer Success Story 2019 #2: Extraction and Classification of Pavement Marking Program
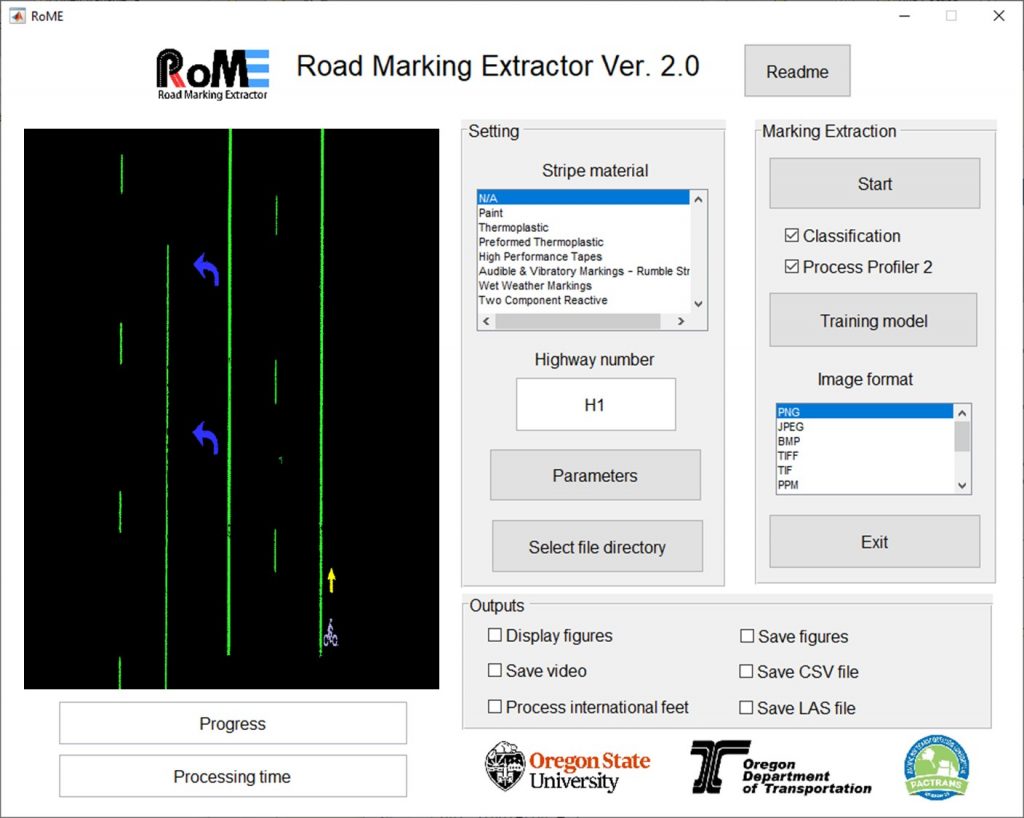
Several years ago, OSU Professor Michael Olsen worked on a project in partnership with the Oregon Department of Transportation, where his team developed the Road Marking Extractor (RoME) tool to extract near-linear pavement markings from mobile lidar data. The following year, with PacTrans funding his team expanded that work with a project titled, “Efficient Extraction and Evaluation of Complex Pavement Markings from Mobile Laser Scan Data,” where they broadened the capabilities of the RoME tool to implement complex marking extraction (e.g., insertion lanes, arrows, text), improved noise filtering, deep learning-based classification, and rigorous tests on real-world data in various noise and road conditions.
The team then leveraged PacTrans Technology Transfer Success Story funding to improve the research tool into a fully-functional prototype tool that can extract and classify various types of road markings. The important milestones of this supplemental funding include: (1) test and optimization, which evaluates the algorithm with various test data and optimizes the settings to improve the classification accuracy; (2) prototype development, which includes cleaning-up and packing the algorithms into the tool with a graphical user interface (GUI); and finally (3) training materials, which provides program user manual and videos of examples to promote the distribution of the tool via the website http://learnmobilelidar.com. The team also produced a 30-second elevator pitch video, which can be found here.
In 2010, Washington State ranked 26 out of 51 for highway traffic fatalities, with 458 fatal traffic deaths.
Source: U.S. Dept. of Transportation, Research and Innovative Technology Administration, Bureau of Transportation Statistics
