
-
March 20, 2024
Automating Data Processing of 3D Point Cloud Data with Vo-Norvana
Lidar and Structure-from-Motion (SfM) technology have been widely used for collecting 3D point cloud data at high resolution and accuracy for various transportation applications, including infrastructure modeling and lane marking quality assessments.
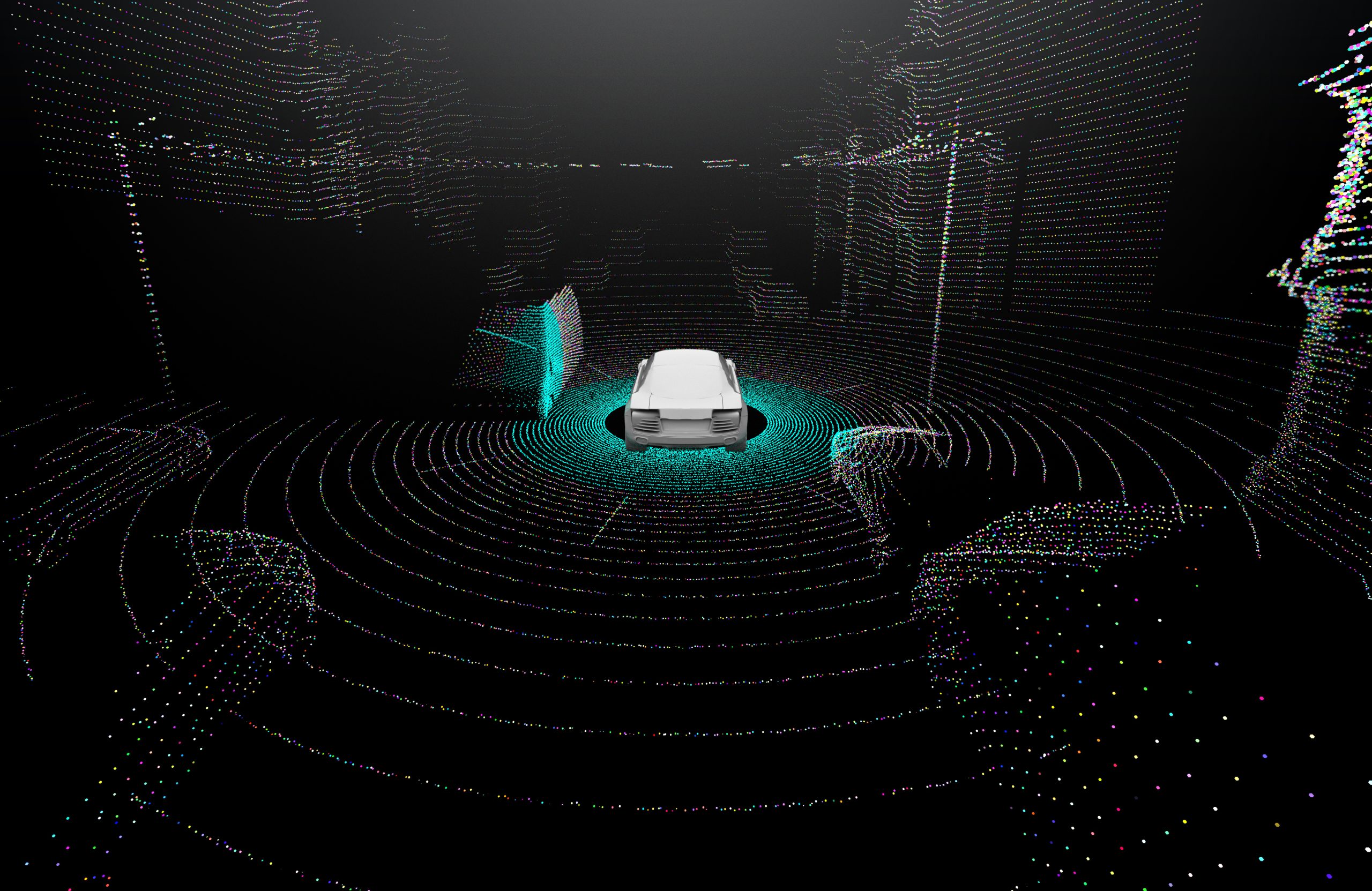
Professors Erzhuo Che and Michael Olsen from Oregon State University (OSU) developed and implemented a framework named Vo-Norvana as part of a National Science Foundation-funded research project. This framework automates a significant portion of data processing by organizing the point cloud into individual segments/surfaces (Figure 1). Despite the extensive use of point cloud data in transportation applications, its complexity and volume present challenges in effective utilization.

(a)

(b)
Figure 1. Example of Vo-Norvana point cloud segmentation: (a) raw mobile lidar point cloud data; (b) segmentation result where each color represents a segment.
Through the PacTrans Success Story Tech Transfer funding, the team worked to make the technology more accessible. They produced an intuitive graphical user interface (GUI) for Vo-Norvana, featuring functions such as point cloud file management, downsampling, and segmentation parameter adjustments. Additionally, the software was made compatible with both Windows and Linux environments.
Vo-Norvana has been presented and demonstrated to industry partners and transportation agencies, including the Oregon Department of Transportation. In 2020, the software was licensed to an OSU spinout company, EZDataMD LLC, for sustainable development and expanded use such as asset management, pavement crack mapping, road marking extraction and evaluation, and rockfall hazard analysis.
Commuting to Work: In 2010, a reported 72.17% of Oregon State drivers drove alone to work, while 10% used car pools and 4.22% used public transit.
Source: U.S. Dept. of Transportation, Research and Innovative Technology Administration, Bureau of Transportation Statistics
