1-dimensional variable-velocity advection¶
One-dimensional advection with variable velocity¶
Solve the conservative variable-coefficient advection equation:
\[q_t + (u(x)q)_x = 0.\]
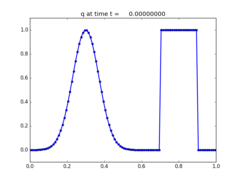
Here q is the density of some conserved quantity and u(x) is the velocity. The velocity field used is
\[u(x) = 2 + sin(2\pi x).\]
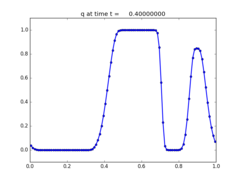
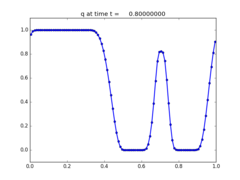
The boundary conditions are periodic. The initial data get stretched and compressed as they move through the fast and slow parts of the velocity field.
Source:¶
#!/usr/bin/env python
# encoding: utf-8
r"""
One-dimensional advection with variable velocity
================================================
Solve the conservative variable-coefficient advection equation:
.. math:: q_t + (u(x)q)_x = 0.
Here q is the density of some conserved quantity and u(x) is the velocity.
The velocity field used is
.. math:: u(x) = 2 + sin(2\pi x).
The boundary conditions are periodic.
The initial data get stretched and compressed as they move through the
fast and slow parts of the velocity field.
"""
from __future__ import absolute_import
import numpy as np
def qinit(state):
# Initial Data parameters
ic = 3
beta = 100.
gamma = 0.
x0 = 0.3
x1 = 0.7
x2 = 0.9
x =state.grid.x.centers
# Gaussian
qg = np.exp(-beta * (x-x0)**2) * np.cos(gamma * (x - x0))
# Step Function
qs = (x > x1) * 1.0 - (x > x2) * 1.0
if ic == 1: state.q[0,:] = qg
elif ic == 2: state.q[0,:] = qs
elif ic == 3: state.q[0,:] = qg + qs
def auxinit(state):
# Initilize petsc Structures for aux
xc=state.grid.x.centers
state.aux[0,:] = np.sin(2.*np.pi*xc)+2
def setup(use_petsc=False,solver_type='classic',kernel_language='Python',outdir='./_output'):
from clawpack import riemann
if use_petsc:
import clawpack.petclaw as pyclaw
else:
from clawpack import pyclaw
if solver_type=='classic':
if kernel_language == 'Fortran':
solver = pyclaw.ClawSolver1D(riemann.vc_advection_1D)
elif kernel_language=='Python':
solver = pyclaw.ClawSolver1D(riemann.vc_advection_1D_py.vc_advection_1D)
elif solver_type=='sharpclaw':
if kernel_language == 'Fortran':
solver = pyclaw.SharpClawSolver1D(riemann.vc_advection_1D)
elif kernel_language=='Python':
solver = pyclaw.SharpClawSolver1D(riemann.vc_advection_1D_py.vc_advection_1D)
solver.weno_order=weno_order
else: raise Exception('Unrecognized value of solver_type.')
solver.kernel_language = kernel_language
solver.limiters = pyclaw.limiters.tvd.MC
solver.bc_lower[0] = 2
solver.bc_upper[0] = 2
solver.aux_bc_lower[0] = 2
solver.aux_bc_upper[0] = 2
xlower=0.0; xupper=1.0; mx=100
x = pyclaw.Dimension(xlower,xupper,mx,name='x')
domain = pyclaw.Domain(x)
num_aux=1
num_eqn = 1
state = pyclaw.State(domain,num_eqn,num_aux)
qinit(state)
auxinit(state)
claw = pyclaw.Controller()
claw.outdir = outdir
claw.solution = pyclaw.Solution(state,domain)
claw.solver = solver
claw.tfinal = 1.0
claw.setplot = setplot
claw.keep_copy = True
return claw
#--------------------------
def setplot(plotdata):
#--------------------------
"""
Specify what is to be plotted at each frame.
Input: plotdata, an instance of visclaw.data.ClawPlotData.
Output: a modified version of plotdata.
"""
plotdata.clearfigures() # clear any old figures,axes,items data
# Figure for q[0]
plotfigure = plotdata.new_plotfigure(name='q', figno=1)
# Set up for axes in this figure:
plotaxes = plotfigure.new_plotaxes()
plotaxes.ylimits = [-.1,1.1]
plotaxes.title = 'q'
# Set up for item on these axes:
plotitem = plotaxes.new_plotitem(plot_type='1d_plot')
plotitem.plot_var = 0
plotitem.plotstyle = '-o'
plotitem.color = 'b'
plotitem.kwargs = {'linewidth':2,'markersize':5}
return plotdata
if __name__=="__main__":
from clawpack.pyclaw.util import run_app_from_main
output = run_app_from_main(setup,setplot)
