Cooperative and Competitive Sensorimotor Learning
Team: Ben Chasnov, Behnoosh Parsa
Mentor: Sam Burden & Lilian Ratliff (ECE)
Humans learn about the world not only through interaction with the environment, but also through interaction with others. In this project, we are investigating the computational mechanisms underlying mutual prediction of agents in a shared environment. We are developing haptic experiments and multi-agent behavioral models, hoping to provide greater insights into the learning schemes employed by social beings.
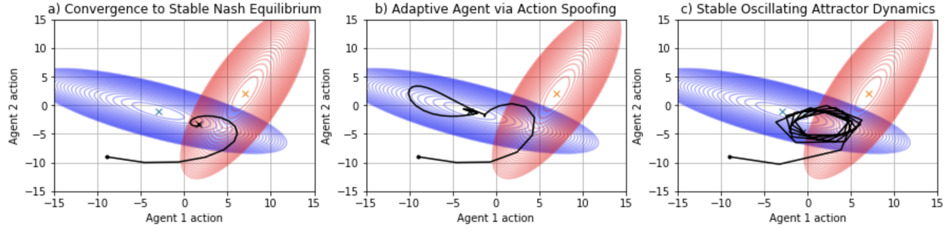
We have recently derived theoretical convergence guarantees for a class of learning scheme in multi-agent systems. By modeling learning itself as a dynamical system, where the joint action space is represented as the state of the system, we can begin to understand conditions under which the strategies of each agent will converge to a stable Nash equilibrium. We are also validating the theory using an experimental testbed that allows humans and autonomous agents to collaborate and compete in a coupled dynamic environment.