Develop a Self-Driving Tricycle
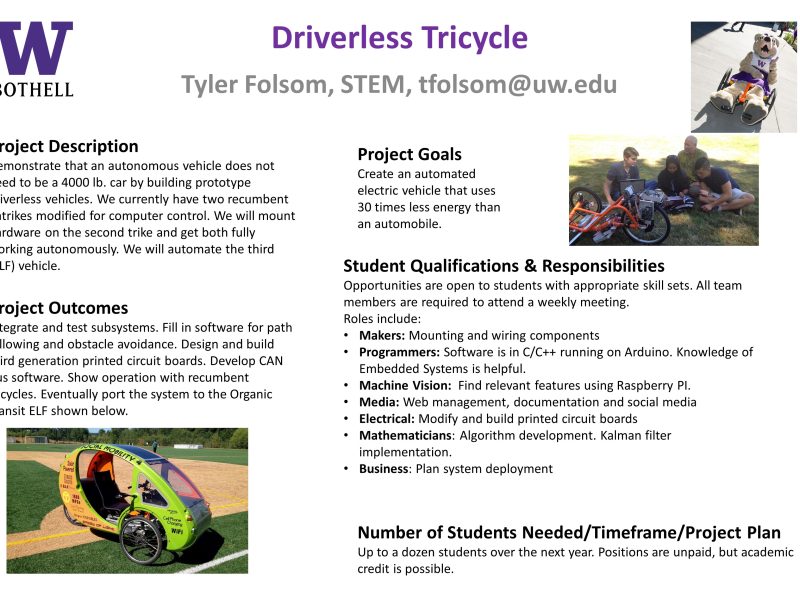
Project Goals: Demonstrate that an autonomous vehicle does not need to be a 4000 lb. car by building prototype driverless vehicles. We currently have two recumbent Catrikes and an Organic Transit ELF modified for computer control. We also have several units that interface with the CARLA driving simulator, allowing us to test the software remotely on a virtual vehicle. Project Goals: Create an automated electric vehicle that uses 30 times less energy than an automobile.
Student Outcomes:
- Project level – Integrate and test subsystems. Fill in software for path following and obstacle avoidance. Design and build third-generation printed circuit boards. Develop CAN Bus software. Show operation with tricycles and virtual vehicles.
- Student level – Gain knowledge of embedded and autonomous systems. Work with a team on real-world problems.
Requirements: The main student team(s) will be doing capstone projects in mechanical, electrical, and computer engineering and must qualify for those programs. Additional opportunities are open to students with appropriate skill sets. All team members are required to attend a weekly meeting. Roles include:
- Makers: Mounting and wiring components Programmers: Software is in C/C++ running on Arduino. Knowledge of Embedded Systems is helpful.
- Media: Web management, documentation, and social media.
- Electrical: Modify and build printed circuit boards.
- Mathematicians: Algorithm development.
- Business: Plan system deployment in conjunction with Micro-AV SPC.
Time commitment:
- This is an ongoing research study.
- Students should commit at least 5 hours per week.
- Up to 12 positions available
Resources and additional content
- Open source project software is on GitHub/Elcano.
- Documentation is on https://www.elcanoproject.org/wiki/Main_Page.
- Commercial sales are handled through Micro-AV.com.
Tags: Autonomous vehicles; Sustainability; Transportation; Embedded Systems
Schools or Related Disciplines:
Business
Science, Technology, Engineering and Math (STEM)
STEM – Computing and Software Systems (CSS)
STEM – Engineering and Mathematics
Category: Research and Creative Projects
Time: estimated hours per week is 4hrs – 9hrs
Credit/Compensation Notes: This is a volunteer or unpaid position
Contact: Tyler Folsom, Ph.D., tfolsom@uw.edu
Go to project or opportunity website for more information