Research Table
Autonomy and Distributed Autonomy
![]()
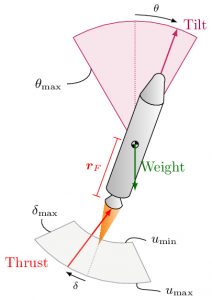
Space Systems and Landers
Spacecraft dynamics and control is one of the areas in which our lab has been active for a number of years. The problems that we have been particularly interested in pertain to spacecraft GN&C, autonomous constraint avoidance, and distributed spacecraft control. Some of these problems are motivated projects that PI Mehran Mesbahi was involved at the Jet Propulsion Laboratory, that included attitude control design and analysis, attitude estimation, and Saturn orbit insertion for the Cassini spacecraft, distributed control systems for missions such as Deep Space 3, Starlight, and Terrestrial Planet Finder, and attitude and articulation subsystem for Shuttle Radar Topography Mission. Over the years, our group has contributed to various facets of guidance, navigation, control, optimization, and estimation problems related to space systems. Our recent work involve adoption of quaternion and dual quaternion representations to provide convex optimization-based solutions to a number of outstanding problems in spacecraft autonomy such as constrained pinpoint landing, distributed actuation, and constrained attitude control, for monolithic and distributed space systems.
The RAIN Lab is also the lead on the design and testing of the Attitude Determination and Control Subsystem (ADCS) for the University of Washington’s HuskySat-1. This work is in collaboration with the UW Satellite team and industry advisors from Planetary Resources. Our group is developing an experimental control algorithm that will demonstrate the capability of optimization based control for spacecraft reorientation in LEO. The anticipated delivery date is August 2018.
Project Sponsors: HuskySat-1, NASA Johnson Space Center, NASA Jet Propulsion Laboratory
Recent Publications:
- T. P. Reynolds and M. Mesbahi, “Coupled 6-DOF Control for Distributed Aerospace Systems,” 57th IEEE Conference on Decision and Control (CDC), Miami Beach, FL, 2018.
- T. P. Reynolds, K. Kaycee, B. Barzgaran, M. Hudoba de Badyn, S. Rice, E. Hansen, A. Adler, B. Acikmese and M. Mesbahi, “Development of a Generic Guidance Navigation & Control System for Small Satellites: Application to HuskySat-1,” AIAA Space Forum, Orlando, FL, 2018.
- D-J. Chen and M. Mesbahi, Constrained Attitude Control, PSD Lifts, and Semidefinite Programming, IEEE Conference on Decision and Control, 2017.
- U. Lee and M. Mesbahi, Constrained autonomous precision landing via dual quaternions and model predictive control, AIAA Journal of Guidance, Control, and Dynamics, Special Issue on Computational Guidance and Control, 40: 292-308, 2017.
- U. Lee, T. Reynolds, B. Barzgaran, M. Hudoba de Badyn, J. Chrisope, A. Adler, K. Kaycee and M. Mesbahi, “Development of Attitude Determination and Control Subsystem for 3U CubeSat with Electric Propulsion”, AIAA Space Conference, Orlando, FL, 2017.
- P. Tsiotras and M. Mesbahi, Toward an Algorithmic Control Theory, AIAA Journal of Guidance, Control, and Dynamics, Special Issue on Computational Guidance and Control, 40: 194-196, 2017.
- T. Reynolds and M. Mesbahi, “Small Body Precision Landing via Convex Model Predictive Control”, AIAA Space Forum, Orlando, FL, 2017.
- K. K. Wu, Y. Yam, H. Meng, and M. Mesbahi, Parallel Probabilistic Swarm Guidance by Exploiting Kronecker Product Structures in Discrete-Time Markov Chains, American Control Conference, 2017.
- U. Lee and Mehran Mesbahi, “6 DOF Power-descent Guidance with Line of Sight Constraint via Unit Dual Quaternions,” AIAA Guidance, Navigation, and Control Conference and Exhibit, 2015.
- U. Lee, D. Besson, M. Mesbahi, Fast inertia property estimation via convex optimization for the asteroid redirect mission, IEEE Conference on Decision and Control, 2014.
- U. Lee and Mehran Mesbahi, “Feedback Control for Spacecraft Reorientation under attitude constraints via Convex Potentials “, IEEE Transactions on Aerospace and Electronic Systems, 2014.
- U. Lee and Mehran Mesbahi, “Dual Quaternion based Spacecraft Control for Constrained Rendezvous in Earth Circular Orbit,” AIAA/AAS Astrodynamics Specialist Conference, San Diego, California, 2014.
- U. Lee and Mehran Mesbahi, “Optimal Spacecraft Reorientation under complex attitude constrained zones”, AAS/AIAA Astrodynamics Specialist Conference, 2013.
- R. Dai, J. Maximoff, and M. Mesbahi, “Formation of Connected Network for Fractionated Spacecraft,” In Proc. of The AIAA Guidance Navigation and Control Conference, 2012.
- U. Lee and Mehran Mesbahi, “Dual quaternions, Rigid Body Mechanics, and Powered-Descent Guidance”, 51th IEEE Conference on Decision and Control, 2012.
- U. Lee and Mehran Mesbahi, “Spacecraft Attitude Synchronization in presence of Constrained zones” In Proc. of the IEEE American Control Conference, 2012.
- U. Lee and Mehran Mesbahi, “Spacecraft Reorientation in Presence of Attitude Constraints via Logarithmic Barrier Potentials,” In Proc. of the IEEE American Control Conference, 2011.
- U. Lee and Mehran Mesbahi, “Constrained Consensus via Log Barrier function”, 50th IEEE Conference on Decision and Control and European Control Conference, 2011.
![]()
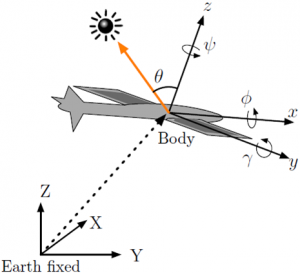
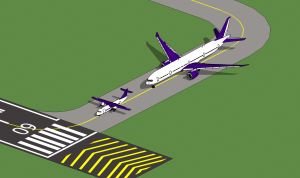
Atmospheric Flight Systems
Flight dynamics and control is one of the cornerstones of aerospace engineering. This discipline aims is to understand the dynamics of the aircraft, quantify various notions of stability and performance for distinct flight conditions, and then design control and estimation algorithms that lead to satisfying various notions of performance and stability criteria. In our group, we examine flight dynamics and control particularly as it relates to optimized and high performance flight systems for various aerial vehicles, including commercial airplanes and unmanned aerial vehicles that can support such missions as search and rescue, fire fighting, and energy optimized long endurance missions. Our approach aims to provide a systematic means of designing highly efficient and constrained systems that are not amenable to design by traditional methods. In this venue, we provide efficient algorithmic tools for criteria such as energy optimization, collision avoidance, trajectory planning, gust load alleviation, energy optimization for hybrid and electric aircraft, total energy management, solar-powered UAVs, among others.

Project Sponsors: Boeing, FAA, AFOSR
- J. Quenzer, B. Barzgaran, M. Mesbahi, K. Morgansen, The Generic Wide Body Aircraft Model, AIAA Science and Technology Forum and Exposition (GN&C Conference), 2018.
- S. Vasisht and M. Mesbahi, A Data-driven Approach for UAV Tracking Control, ASME Dynamic Systems and Control Conference, 2017.
- S. Hosseini and M. Mesbahi, Energy aware aerial surveillance for a long endurance solar-powered UAV, AIAA Journal of Guidance, Control, and Dynamics Vol. 39, No. 9, pp. 1980-1993, 2016.
- P. Panyakeow and M. Mesbahi, Deconfliction algorithms for a pair of constant speed unmanned aerial vehicles, IEEE Transactions on Aerospace and Electronic Systems, 50 (1): 456 – 476, 2014.
- A. Chapman and M. Mesbahi, “UAV Swarms: Models and Effective Interfaces,” In Handbook of Unmanned Aerial Vehicles, Springer, 2014.
- S. Hosseini, R. Dai, and M. Mesbahi, “Power Management of Cooling Systems with Dynamic Pricing,” American Control Conference, 2014.
- P. Panyakeow, R Dai, and M. Mesbahi, “Optimal Trajectory for Network Establishment of Remote UAVs” In Proc. of The IEEE American Control Conference, 2013.
- S. Hosseini and M. Mesbahi, “Energy Aware Aerial Surveillance for Long Endurance Solar-Powered UAV, ” In Proc. of The AIAA Guidance Navigation and Control Conference, 2013.
- S. Hosseini, R. Dai, and M. Mesbahi,”Optimal Path Planning and Power Allocation for a Long Endurance Solar-Powered UAV,” In Proc. of the IEEE American Control Conference, 2013.
- R. Dai and M. Mesbahi, Optimal power generation and load management for off-grid hybrid power systems with renewable sources via mixed-integer programming, Energy Conversion and Management, 73: 234-244, 2013.
- R. Dai, U. Lee, S. Hosseini, and M. Mesbahi, “Optimnal Path Planning for Solar-Powered UAVs Based on Unit Quarternions,” 3104-3109, In Proc. of the 51st IEEE Conference of Decision and Control, 2012.
- A. Chapman, R. Dai, and M. Mesbahi, “Network Topology Design for UAV Flocking with Wind Gusts,” In Proc. of the AIAA Guidance, Navigation, and Control Conference, 2011. (Slide)
- A. Chapman and M. Mesbahi, ” UAV Flocking with Wind Gusts: Adaptive Topology abd Model Reduction,” 1045-1050, In Proc. of the American Control Conference, 2011.
![]()
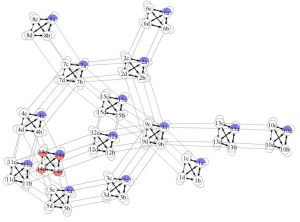
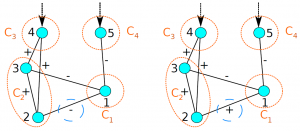
Autonomous Networks
As networks become ubiquitous in many areas of engineering, it has become of paramount importance to examine how the network and its structure effect the dynamic properties of the overall system, such as its stability, performance, and robustness, both in the random and deterministic settings. We also consider some of the more fundamental system-theoretic questions such as controllability and observability of networked systems. Our research team examines a wide range questions from theoretical point of view as well as their ramifications for systems such as multiple spacecraft formation flying, distributed robotics, UAV formations, heterogeneous dynamic networks, and more recently, in the setting of social and biological networks.
![]()
Project Sponsors: AFOSR, ARO/MURI, NSF, DARPA
Recent Publications:
- A. Awad, A. Chapman, E. Schoof, A. Narang-Siddarth, and M. Mesbahi, Time-scale separation in networks: state-dependent graphs and consensus tracking, IEEE Transactions on Network Control Systems (to appear).
- E. Schoof, A. Chapman and M. Mesbahi, Weighted Bearing-Compass Dynamics: Edge and Leader Selection, Transactions on Network Science and Engineering (in-press).
- M. Hudoba de Badyn, S. Alemzadeh, and M. Mesbahi, Controllability and Data-Driven Identification of Bipartite Consensus on Nonlinear Signed Networks, IEEE Conference on Decision and Control, 2017.
- S. Alemzadeh, M. Hudoba de Badyn, and M. Mesbahi, Controllability and Stabilizability of Signed Consensus Networks, IEEE Conference on Control Technology and Applications, 2017.
- H. Shao, Y. Xi, M. Mesbahi, and D. Li, Relative Tempo of Multiplex Consensus Networks, IFAC World Congress, 2017.
- A. Chapman, E. Schoof, and M. Mesbahi, Pattern Control for Networks of Ginzburg-Landau Oscillators via Markov Decision Processes, IEEE Conference on Decision and Control, 2016.
- S.S. Mousavi, M. Haeri, and M. Mesbahi, “Robust strong structural controllability of networks with respect to edge additions and deletions”, In Proc. of the American Control Conferece 2017: 5007-5012
- S.S. Mousavi, M. Haeri, and M. Mesbahi, “On the Structural and Strong Structural Controllability of Undirected Networks”, IEEE Transactions on Automatic Control, 2017
- J. Emenheiser, A. Chapman, M. Posfai, J. P. Crutchfield, M. Mesbahi, and R. M. D’Souza, Patterns of patterns of synchronization: Noise induced attractor switching in rings of coupled nonlinear oscillators, Chaos, 2016 Sep; 26 (9): 094816.
- A. Chapman and M. Mesbahi, “On Symmetry and Controllability of Multi-Agent Systems,” IEEE Conference on Decision and Control, 2014.
- A. Chapman and M. Mesbahi, “Kronecker Product of Networked Systems and their Approximates,” International Symposium on Mathematical Theory of Networks and Systems, 2014.
- E. Schoof, A. Chapman and M. Mesbahi, “Bearing-compass formation control: A human-swarm interaction perspective,” American Control Conference, 2014.
- H. Shao and M. Mesbahi, “Degree of Relative Influence for Consensus-type Networks,” American Control Conference, 2014.
![]()
Machine Learning, Optimization, and Control
Optimization and control theory deal with different aspects of the following problem: given that certain parameters or inputs for a static or dynamic system are available for design, how should they be selected such that the resulting “closed loop” or optimized system has the desired properties? The mathematics of such an intuitive problem that seems to be at the heart of all engineering sciences, rather surprising, span a lot of distinct mathematical disciplines, from analysis and optimization, to algebra and combinatorics. Our group’s research has worked on the applications of optimization theory to problems in feedback design and estimation.
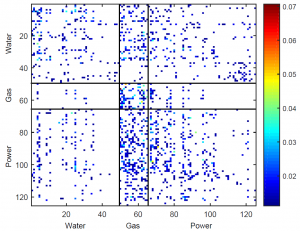
More recently, we have been examining the areas of data-guided control and online optimization both for single and distributed systems. This research aims to systematically combine key aspects of data science, machine learning, and control to address theoretical and applied aspects of how to go from data to models and decisions. Applications of such data-guided decision-making in aerospace, energy optimization, transportation, recovery for infrastructure networks, and biological networks are currently of great interest.
Project Sponsors: NSF, ONR, Boeing, ARO/MURI
Recent Publications:
- A. D. González, A. Chapman, L. Dueñas-Osorio, M. Mesbahi and R. M. D’Souza, Efficient Infrastructure Restoration Strategies using the Recovery Operator, Computer-Aided Civil and Infrastructure Engineering (to appear).
- S. Vasisht and M. Mesbahi, A Data-driven Approach for UAV Tracking Control, ASME Dynamic Systems and Control Conference, 2017.
- M. Hudoba de Badyn and M. Mesbahi, Large Scale Distributed Kalman Filtering via an Optimization Approach, IFAC World Congress, 2017.
- D. Meng, R. Eghbali, M. Fazel, and M. Mesbahi, Online Algorithms for Network Formation, IEEE Conference on Decision and Control, 2016.
- S. Hosseini, A. Chapman, and M. Mesbahi, Online distributed optimization on dynamic networks, IEEE Transactions on Automatic Control, 61 (11): 3545 – 3550, 2016
- D. Meng, M. Fazel, and M. Mesbahi, Proximal alternating direction method of multipliers for distributed optimization on weighted graphs, IEEE Conference on Decision and Control, 2015.
- S. Hosseini, A. Chapman, and M. Mesbahi, “Online Distributed Optimization via Dual Averaging,”. In Proc. of the 52nd IEEE Conference on Decision and Control, 2013.
- S. Hosseini and M. Mesbahi, “Energy aware aerial surveillance for a long endurance solar-powered UAV,” AIAA Guidance, Navigation and Control Conference., 2013.
- S. Hosseini, R. Dai, and M. Mesbahi, “Optimal path planning and power allocation for a long endurance solar-powered UAV,” American Control Conference, 2013.