Problems that pertain to spacecraft GN&C, autonomous constraint avoidance, and distributed spacecraft control are some of the areas in which our lab has been active for a number of years. Some of these problems are motivated projects that PI Mehran Mesbahi was involved at the Jet Propulsion Laboratory, that included attitude control design and analysis, attitude estimation, and Saturn orbit insertion for the Cassini spacecraft, distributed control systems for missions such as Deep Space 3, Starlight, and Terrestrial Planet Finder, and attitude and articulation subsystem for Shuttle Radar Topography Mission. Over the years, our group has contributed to various facets of spacecraft dynamics and control including constrained attitude control, powered descent guidance, formation flying for networked and distributed spacecraft and many more.
Our work combines ideas from elementary graph theory, linear matrix inequalities & convex analysis, unit dual quaternions and more to provide novel solutions to outstanding problems in spacecraft dynamics and control. Our group maintains a strong focus on studying both theoretical and numerical aspects of the resulting GN&C algorithms.
Project Sponsors: NASA Johnson Space Center, NASA Jet Propulsion Laboratory.
Constrained Attitude Control
Constrained attitude control is one of the areas our group has contributed to many years. Spacecraft equipped with heat or light sensitive instruments (e.g., cryogenically cooled infrared telescopes, star trackers, low-energy ion composition analyzers) may be subject to constraints on permissible orientations. These problems consider an autonomous maneuver planning algorithm for three-axis attitude reorientation in the presence of multiple types of attitude-constrained zones. This is inspired by the finding that the subgroup of the unit quaternions corresponding to attitude-constrained zones can be represented by a convex set.Two types of attitude-constrained zones are defined; the attitude-forbidden and mandatory zones. Both model-dependent and model-independent feedback control laws are derived and shown to be almost globally asymptotically stable.
Select Publications:
- Y. Kim, M. Mesbahi, G. Singh, F.Y. Hadaegh, “On the Convex Parametrization of Spacecraft Orientation in Presence of Constraints and its Applications,” IEEE Transactions on Aerospace and Electronic Systems, 2010.
- U. Lee and M. Mesbahi, “Spacecraft Reorientation in Presence of Attitude Constraints via Logarithmic Barrier Potentials,” In Proc. of the IEEE American Control Conference, 2011.
- U. Lee and M. Mesbahi, “Feedback Control for Spacecraft Reorientation under attitude constraints via Convex Potentials,” IEEE Transactions on Aerospace and Electronic Systems, 2014.
Powered Descent Guidance
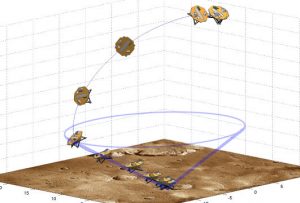
Some of our recent work focuses on optimization-based solutions to constrained pinpoint landing problems. It is challenging to design an autonomous control algorithm for such a problem, due to the fact that coupled rotational and translational motions affect the missions constraints. Our approach combines the dual quaternion formulation of 6-degree-of-freedom equations of motion for a rigid body with novel convex set representations of all constraints. We then use convex optimization to rapidly compute feasible and locally optimal trajectories. We have explored both Model Predictive Control and feedforward guidance schemes, studying both theoretical and numerical aspects of the resulting algorithms.
Select Publications:
- U. Lee and M. Mesbahi, “Dual Quaternions, Rigid Body Mechanics, and Powered-Descent Guidance,” IEEE Conference on Decision and Control, 2012.
- U. Lee and M. Mesbahi, “Constrained Autonomous Precision Landing via Dual Quaternions and Model Predictive Control,” Journal of Guidance, Control, and Dynamics, 2017.
- T. P. Reynolds, M. Szmuk, D. Malyuta, M. Mesbahi, B. Acikmese and J. M. Carson III, “Dual Quaternion Based Powered Descent Guidance with State-Triggered Constraints,” Journal of Guidance, Control, and Dynamics, 2020.
- T. P. Reynolds, D. Malyuta, M. Mesbahi, B. Acikmese and J. M. Carson III, “A Real-Time Algorithm for Non-Convex Powered Descent Guidance,” AIAA SciTech Forum, 2020.
Formation Flying & Distributed Spacecraft Control
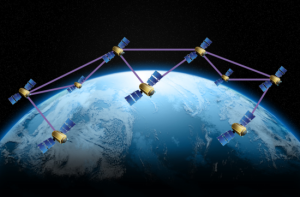
Formation flying has been identified as an enabling technology for many of the future NASA deep space and earth science missions. Our work combines ideas from elementary graph theory, linear matrix inequalities, estimation, nonlinear programming and more to shed light on the class of spacecraft formations and control designs that are feasible for representative sets of formation flying scenarios.
Selected Publications:
- M. Mesbahi and F. Y. Hadaegh, “Formation Flying Control of Multiple Spacecraft via Graphs, Matrix Inequalities, and Switching,” Journal of Guidance, Control, and Dynamics, 2001.
- R. Dai, J. Maximoff, M. Mesbahi, “Formation of Connected Networks for Fractionated Spacecraft,” AIAA Guidance, Navigation, and Control Conference, 2012.
- U. Lee and M. Mesbahi, “Spacecraft Attitude Synchronization in presence of Constrained zones,” In Proc. of the IEEE American Control Conference, 2012.
Rendezvous, Distributed Estimation and Distributed Actuation
This research studies an advanced attitude control system for a solar electric propulsion (SEP) spacecraft. In the research, three algorithms related to attitude control have been developed. First, rendezvous with tumbling objects in circular Earth orbit or in deep space. Such tumbling objects are exemplified by potentially unpowered satellites, space debris from launch vehicles, or near-Earth asteroids. The object’s rotational motion restricts the direction of approach, and the rendezvous problem becomes a challenging coupled rotationally- and translationally-constrained motion planning problem. To approach this problem, we take advantage of a unit dual quaternion parameterization to compactly represent relative motion dynamics in circular Earth orbit, as well as rotational dynamics.
Second, this research examines the motion estimation problem for space objects using multiple image sensors in a connected network. The objective is to increase the estimation precision of relative translational and rotational motions based on integrated dual quaternion dynamics and cooperation between connected sensors. We apply an optimization decomposition method to decompose the cooperative estimation task into a series of suboptimal problems, and then solve them individually for each image sensor in order to achieve global optimality.
Third, accurate inertial property estimation is critical to the success asteroid retrieval missions. The inertia tensor, center of mass, and total mass of the spacecraft-asteroid combined rigid body must be accurately estimated so that SEP can be used to return the asteroid to Earth. This study develops an efficient algorithm to solve for those properties. The estimation is framed as a least squares minimization problem, subject to convex constraints that improve convergence rates. Simulations are performed to assess the algorithm’s performance in a typical mission scenario. With only limited data measurements, the proposed algorithm quickly and accurately determines the combined body’s inertial properties.
Selected Publications:
- U. Lee and M. Mesbahi, “Dual Quaternion based Spacecraft Control for Constrained Rendezvous in Earth Circular Orbit,” AIAA/AAS Astrodynamics Specialist Conference, 2014.
- Y. Zu, U. Lee, R. Dai, “Distributed Motion Estimation of Space Objects Using Dual Quaternions,” AIAA/AAS Astrodynamics Specialist Conference, 2014.
- U. Lee, D. Besson, and M. Mesbahi, “Fast Inertia Estimation via Convex Optimization for the Asteroid Retrieval Mission,” 53th IEEE Conference on Decision and Control, 2014.