Flight dynamics and control is one of the cornerstones of aerospace engineering. This discipline aims is to understand the dynamics of the aircraft, quantify various notions of stability and performance for distinct flight conditions, and then design control and estimation algorithms that lead to satisfying various notions of performance and stability criteria. In our group, we examine flight dynamics and control particularly as it relates to optimized and high performance flight systems for various aerial vehicles, including commercial airplanes and unmanned aerial vehicles that can support such missions as search and rescue, fire fighting, and energy optimized long endurance missions. Our approach aims to provide a systematic means of designing highly efficient and constrained systems that are not amenable to design by traditional methods. In this venue, we provide efficient algorithmic tools for criteria such as energy optimization, collision avoidance, trajectory planning, gust load alleviation, energy optimization for hybrid and electric aircraft, total energy management, solar-powered unmanned aerial vehicles (UAVs), among others.
Project Sponsors: Boeing, FAA, AFOSR.
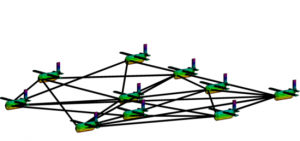
Gust Load Alleviation for UAV Swarming
Dynamics network redesign provides and approach to improve the effectiveness of the human controllers’ signal in reducing a wind gust perturbing the UAV swarm. Specifically, by rewiring the interaction network topology, we are able to amplify the human controllers’ signals, to more effectively dampen the perturbation.
Selected Publications:
- A. Chapman and M. Mesbahi, “UAV Swarms: Models and Effective Interfaces,” Handbook of Unmanned Aerial Vehicles, K.Valavanis and G. Vachtsevanos (eds), Springer, Dordrecht, 2015.
- A. Chapman and M. Mesbahi, “UAV Flocking with Wind Gusts: Adaptive Topology and Model Reduction,” Proc. of the American Control Conference, 2011. (Best Session Presentation Award).
H2/H-inf Optimal Load Alleviation for Modern Aircraft
Wind gusts cause additional fuel expenditure, metal fatigue, structural deformation, as well as reduction in flight comfort. By using controlled deflections of tail and wing control surfaces, it is possible to minimize the amplitude and the number of transient bending cycles to which the structure maybe subjected in flight.
Gust Load Alleviation (GLA) systems are used to reduce the effects of the gust turbulence on the vertical (and side) motion of an aircraft to decrease airframe load and improve passenger comfort. New designing technology for modern aircraft allows us to introduce new type of control surfaces and implement the latest control theory and optimization framework, for example H-2 and H-inf optimal control techniques are considered. The future works includes the use of L1-system norm and model predictive control to view the problem from the time-domain perspective.
- J. Quenzer, B. Barzgaran, M. Mesbahi, K. Morgansen, The Generic Wide Body Aircraft Model, AIAA SciTech Forum, Kissimmee, FL 2018.

Collision Avoidance for UAVs
Collision avoidance and deconfliction are important when UAVs must operate in close proximity to each other. Deconfliction algorithms are designed to guarantee collision-free convergence to the final desired destination for each UAV in the presence of static and moving obstacles. The algorithms consider that the UAVs are subject to a maximum turn-rate during the avoidance maneuver, while seeking the least deviation from the nominal path. The unicycle model is chosen to represent the nonholonomic property of UAVs and is suitable for the turn-rate study.Using Lasalle’s Invariance Principle, collision avoidance can be guaranteed by leveraging the swirling effects that always put the UAV in the detection range until each vehicle is safe from collisions. The algorithms are developed from the concepts of: (i) navigation functions to help direct the UAV to a destination and avoid static obstacles, (ii) swirling functions to help steer the UAVs counter-clockwise, avoiding collision with other moving obstacles and (iii) collision cones with safety angles that help adjust the performance (minimize nominal path deviation, reduce trajectories overshoot, etc.)
Selected Publications:
- P. Panyakeow and M. Mesbahi, “Deconfliction Algorithm for a pair of Constant Speed Unmanned Aerial Vehicles,” IEEE Transaction on Aerospace and Electronics Systems, January 2014.
- P. Panyakeow and M. Mesbahi, “Decentralized Deconfliction Algorithm for Unicyce UAVs,” in Proc. of the IEEE American Control Conference, June 2010.
- A. Rahmani, K. Kosuge, T Tsukamaki, and M Mesbahi, “Multiple UAV Deconfition via Navigation Functions,” in Proc. of the AIAA Guidance Navigation and Control Conference, August 2008.

Solar Powered UAVs
In this project the problem of optimal path planning and power allocation for UAVs is explored. The UAVs are equipped with photovoltaic cell on top of their wings and their energy sources are solar power and rechargeable batteries. The Sun incidence angle on the photovoltaic cells, which substantially affects energy harvesting, is determined by the attitude of the UAV and the sun position.
Selected Publications:
- S. Hosseini and M. Mesbahi, “Energy aware aerial surveillance for a long endurance solar-powered UAV,” AIAA Journal of Guidance, Control, and Dynamics, 2016.
- S. Hosseini, R. Dai, and M. Mesbahi,”Optimal Path Planning and Power Allocation for a Long Endurance Solar-Powered UAV,” In Proc. of the IEEE American Control Conference, 2013.
Optimal Trajectory Planning for Network Establishment with UAVs
This research focuses on tasks such as monitoring, imaging, reconnaissance, data-processing, etc., whereby UAVs are required to perform the task in a distributed fashion. In such problems, the relative distances between vehicles may exceed their maximum communication range — creating uncertain network connectivity. In order to reestablish network connectivity for data exchange and to resume mission operation as a group, we focus on the problem of controlling vehicles that are initially out of range to an area where they can sense each other.
Optimization and nonlinear programming methods are used to determine the shortest trajectories that bring the UAVs to a connected formation where they are in range of detection of one another, and oriented in the same direction to maintain the connectivity. The methods are designed from the fundamental concept of Pontryagin Minimum Principle and bang-bang control.
Select Publications:
- R. Dai, U. Lee, S. Hosseini, and M. Mesbahi, “Optimnal Path Planning for Solar-Powered UAVs Based on Unit Quarternions,” In Proc. of the 51st IEEE Conference of Decision and Control, 2012
- P. Panyakeow, R Dai, and M. Mesbahi, “Optimal Trajectory for Network Establishment of Remote UAVs” In Proc. of The IEEE American Control Conference, 2013.