 My Role in RAIN
My Role in RAIN
I joined Dr. Mesbahi’s lab in late July of 2017, after spending 3 years working in industry at Intel as an Engineering Technician. As I have a heavy interest and background in hardware development, I’ve found myself drawn to taking on the role of development of the RAIN Lab’s next generation hardware test platform. It was in undertaking this role that sparked a newfound interest in quadrotors, and their use as distributed swarm actuators. While there has been much work done focusing on object transportation using pre-computed trajectories, I’ve become quite interested in attempting to apply more simplistic approaches like formation control through consensus dynamics to be used as a means of object manipulation.
While developing the flight controls and interfacing for the quadrotor test-bed, I began to develop a 3D visualization space for the quadrotor telemetry feedback. This has been a useful tool in trouble-shooting errors in newly programed controllers, as well as offers us a unique method of displaying the network connections. My plan is to continue developing this visualization space into a full VR interface for operating and manipulating the quadrotor test-platforms.
e-mail: tjmiesen@uw.edu
About Me
More personally, my hobbies and interests are quite broad, which has lead me to become somewhat of a factotum. At any given point in time I’m actively working on 3-4 side-projects, amidst my research and school work. I have a small passion for art and video-games, and have been developing my own personal games over the past 10 years (both in blender and Unreal 4), which has honed skills in programming, 3D modeling, and 2D graphic art. As such I’ve often made use of my artistic talents in both designing graphics for presentations and demonstrations, as well as practical models for use in 3D printed parts and user interfaces. My hands-on nature draws many of the projects I take part in have some prototyping element, which has helped hone my CAD modeling and simulation expertise.
Education
- B.S. Mechanical Engineering, Portland State University (Maseeh College, 2012)
- M.S Aerospace and Astronautics, University of Washington Seattle (In Progress)
Research Interests
When first applying to the program, much of my interest was focused on space-based applications, specifically in the efforts surrounding asteroid mining. However, I’ve recently found myself quite intrigued by the concept of coordinated networks of aerial platforms, specifically quadrotors and their various analogs. While this field has been extensively explored by both research and industry interests, there are still a number of unanswered questions and applications that have yet to be investigated. Specifically how can we use distributed systems to execute complex coordinated tasks like object pick-up, or object capture. Later, any developments made for these aerial platforms can then be translated to space-based systems, for things like asteroid capture and control, or mining unit maintenance.
Since my joining the lab, I’ve been using my expertise in hardware design and prototyping to provide a swarm of modular, small-scale quadrotors that can be both used for my future thesis work, as well as a demonstration platform for the various control algorithms developed by the lab.
Hardware Test-bed Prototype (RAINDrop)
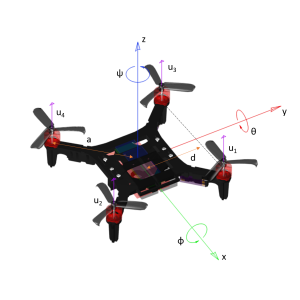
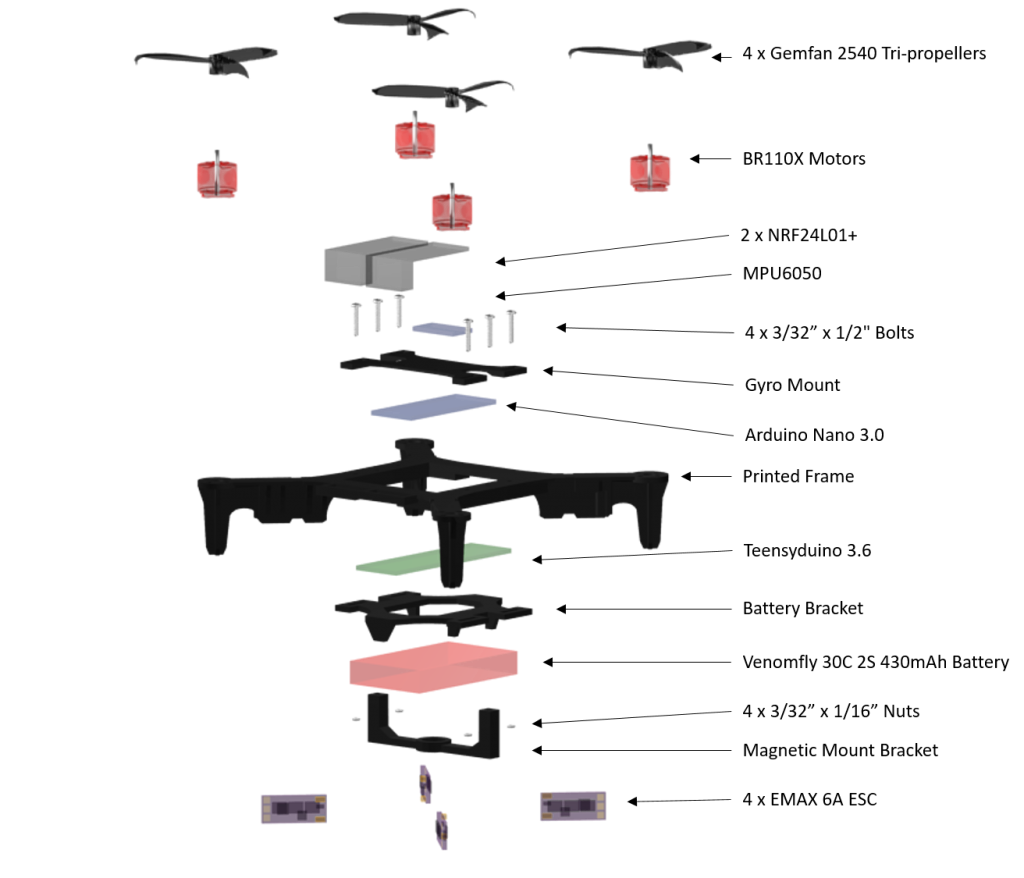
The current prototype is operating using a house-made 3D printed frame, with parts all designed and refined through a rapid prototyping process. The controller architecture leverages a cascaded control scheme, where the inner-loop controller is dedicated to handling fast attitude corrections and PWM signal generation (used to operate the brushless DC motors in tandem with a dedicated electronic speed controller – ESC), and the outer-loop control is charged with platform communication and guidance. Since the timing of the inner-loop is dictated by the PWM pulse-length (at minimum 2ms/loop) we chose to leverage an Arduino Nano’s (16 MHz) small profile to fill this roll. Since much of the computational load is handled by position control, trajectory generation, and communication, the outer-loop guidance controller was chosen to be a TEENSY 3.6 (180 MHz), which offers a significant performance boost, while still being able to interface easily with the Nano’s architecture. (Final construction shown below)


Communication Network Design
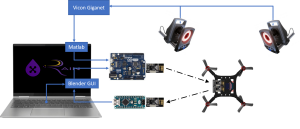
In addition to the baseline quadrotor development, I was also tasked with development of the interfacing peripheral hardware to control and interact with the platform. A popular intuitive method for interfacing with any robotic system is a graphical user interface (GUI), as it can be used to both send command information and display quadrotor telemetry in a meaningful manner. Since the quadrotor position control is sensitive to the GPS update rate, one factor considered was the partitioning of the GPS data-stream from the GUI. This partitioning also has the added advantage of having more graphically heavy display methods for rendering trajectories, network maps, and potential fields.
Virtual Reality (VR) Integration
Throughout the design of the hardware test-bed, I have also designed a visual interface using Blender and Python, to allow for the end-user to intuitively interface with and control a given agent. Features include standard joystick control, manual obstacle placement (virtual obstacles), live obstacle tracking (webcam-openCV interfaced), and live telemetry feedback, with recording and storage capabilities. (shown below)
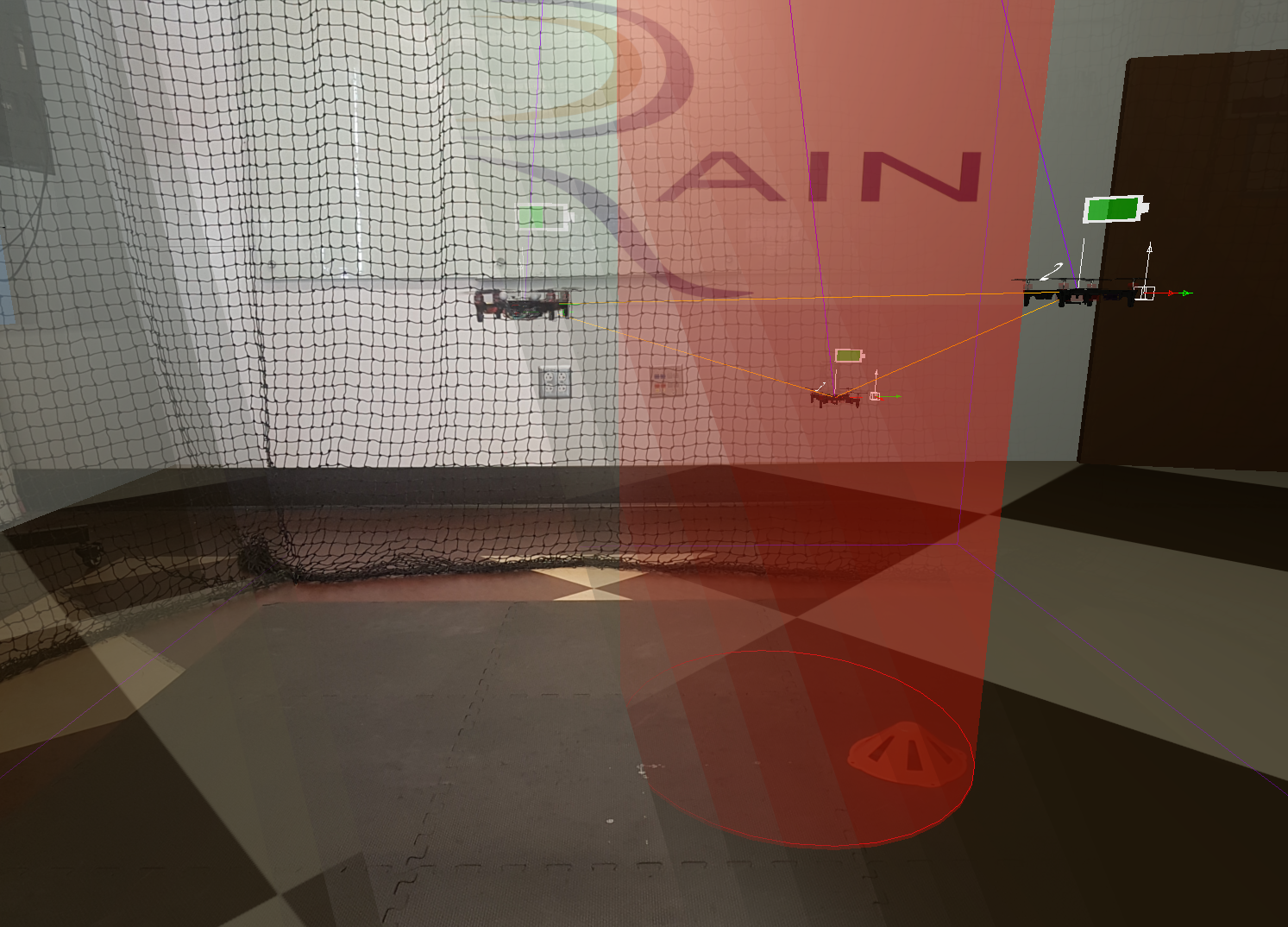
As my work on the quadrotor test-platform transitions from a design and troubleshooting, towards implementation of control algorithms and end-user interfacing, one key point of interest I’ve had has been the adaption of modern VR technology into swarm control and network modifications. In particular, I want to design an interface that allows for the user to intuitively make active modifications a network of flying agents, and control the swam without having to instruct each agent explicitly (the basis of formation control). There are a number of incredible methods for interfacing with swarms using modern network dynamics, and my goal is to leverage those very methods to reduce the burden on the user through an intuitive interface, allowing them to better focus the task of interest.
Potential Map Visualization and Integration
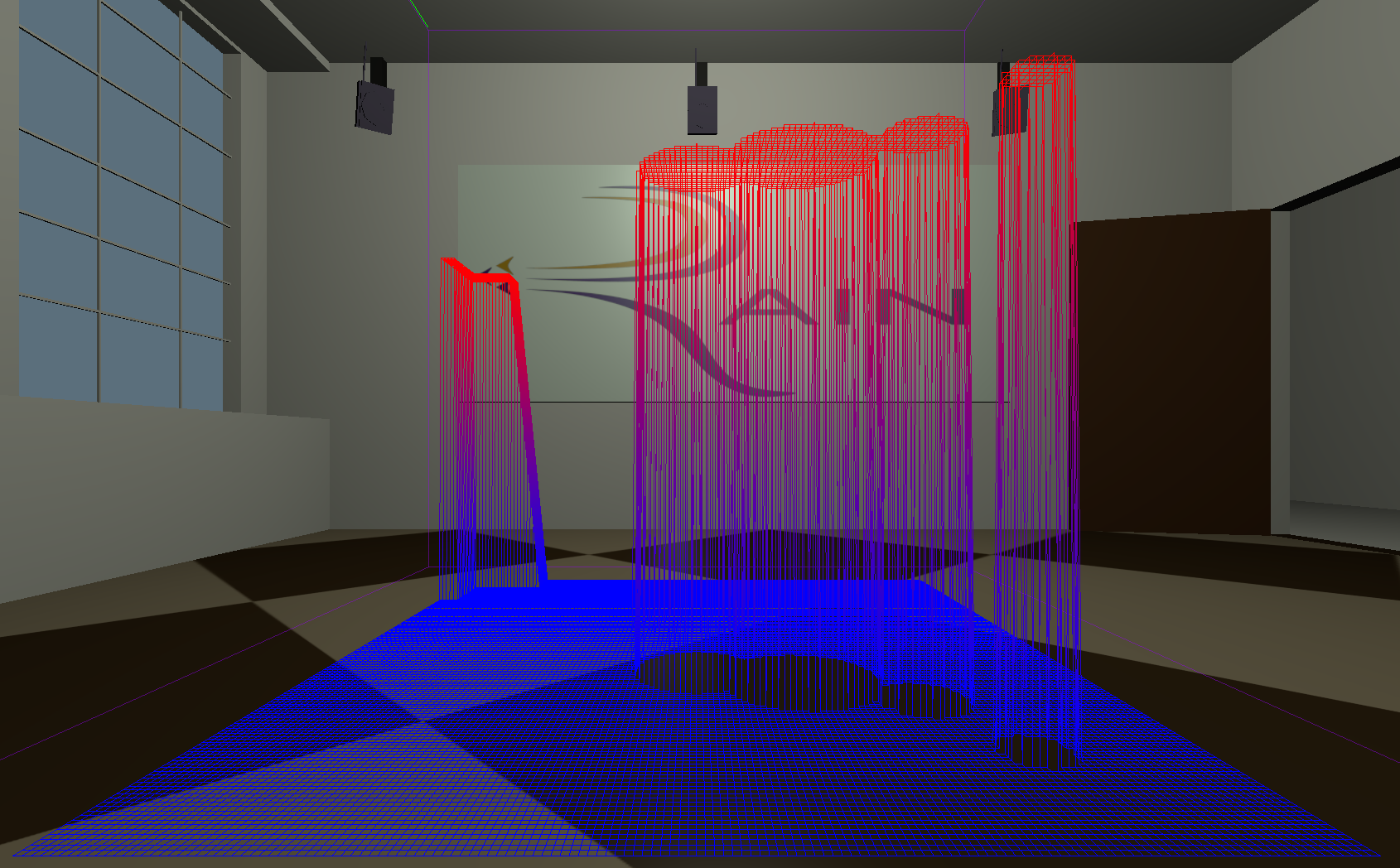
One approach to trajectory planning for robotics is use of a potential field to provide a cost associated with certain regions of the map. The goal of such algorithms is to choose the path that minimizes the cost represented by the height of the map. To make this process more intuitive for the researcher working with the quadrotors, I developed a visual representation of the potential map within the Blender GUI. The resolution of this map is 1.5 m x 1.5 m, with 10 mm x 10 mm squares. The target of this project is to devise, display, and execute a trajectory along the minimal cost path of the displayed map. Since Blender supports a python interface, the computations can be either done within the GUI, or in Matlab and passed through a temporary file. This work is being done in collaboration with Aditya, who is a RAIN lab member developing the potential field and trajectory planning.
Matlab Simulation Development
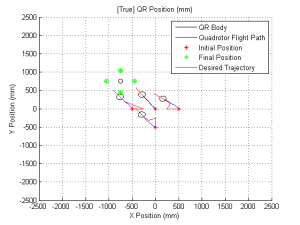
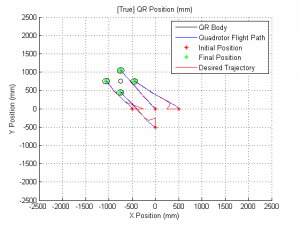
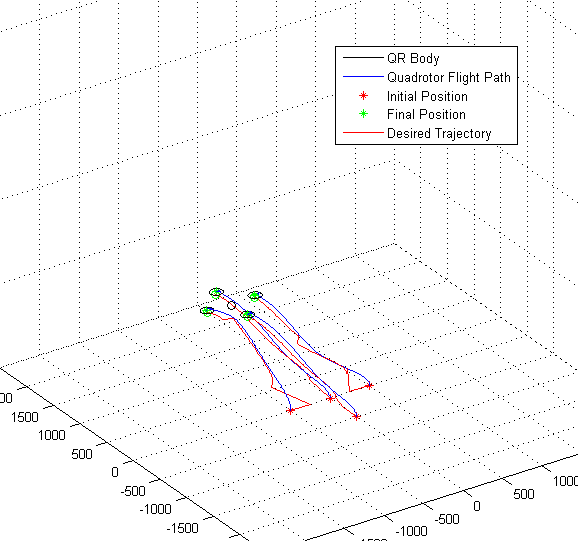
An integral part of testing and qualifying candidate algorithms for use on the RAINDrop platform, is the development of an accurate simulation that both emulates the on board discretized cascade control scheme, as well as accurately estimates the continuous dynamics of the quadrotor itself. One key component of the simulation is the partitioning of data that the quadrotor realistically has access to, and the simulation parameters necessary to produce a viable estimation of the dynamics. Additionally, as RAIN is a networks lab, most of the algorithms that will be tested on the RAINDrops will be centered around multi-agent interactions. As such, the simulation has been set up such that it simultaneously simulates a user-defined number of agents at each time-step. The eventual goal of this simulation is to have a well-documented, user-friendly simulation, that users can add and remove custom algorithms (estimation, trajectory generation, control, etc) with relative ease.
Flight Space Design
The previous robotics platforms developed in the RAIN lab were primarily restricted to ground operations, which affords both better platform stability and control when translating, while additionally allowing for longer communication delays on the GPS data uplink (Vicon system). One major complication that arises when extending platform operations into 3D is that of safety. Since the bulk stopping power of aerial platforms (like multi-rotors) leverages air manipulation (rotor redirection, air brakes, etc), which is an actively enforced reaction of the on-boad controller. Since stopping actions require an active, stable flight controller, mandates passive safety measures to ensure the safety of the lab personnel and equipment.
To address the needs of functionality, ease of setup, and small storage profile, I designed a hanging net that can be deployed using a ceiling-mounted curtain rail (shown below).
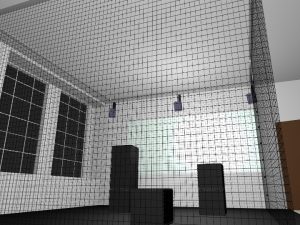


Rendered mock-up (top), final installed netting (center), stored final installed netting (bottom)
Past Research Background (Pre-UW)
Prior to moving to Seattle, while I was attending Portland State (and for several years after graduation), I worked as a volunteer research assistant to Dr. Marilyn Mackiewicz, driving her research on hybrid silver nanoparticles. As an engineer, nano-scale chemistry offered a unique challenge, since the approaches required to test and measure changes made on such a small scale are significantly different than what is demanded on a macroscopic level.
Publications
Papers
- Rosina Ho Wu, Tan P. Nguyen, Grant W. Marquart, Thomas J. Miesen, Theresa Mau and Marilyn R. Mackiewicz, T. P. (May 2014). A Facile Route to Tailoring Peptide-Stabilized Gold Nanoparticles Using Glutathione as a Synthon. Molecules, 6754-6775.
Awards
- 1st-Place in Material Science at ACS Poster Symposium (2014)
- 1st-Place in engineering design competition (MCECS, 2012)