CTRL members at ICRA 2024!
Jasper Geldenbott and Kazuki Mizuta attended ICRA 2024 at Yokohama, Japan.
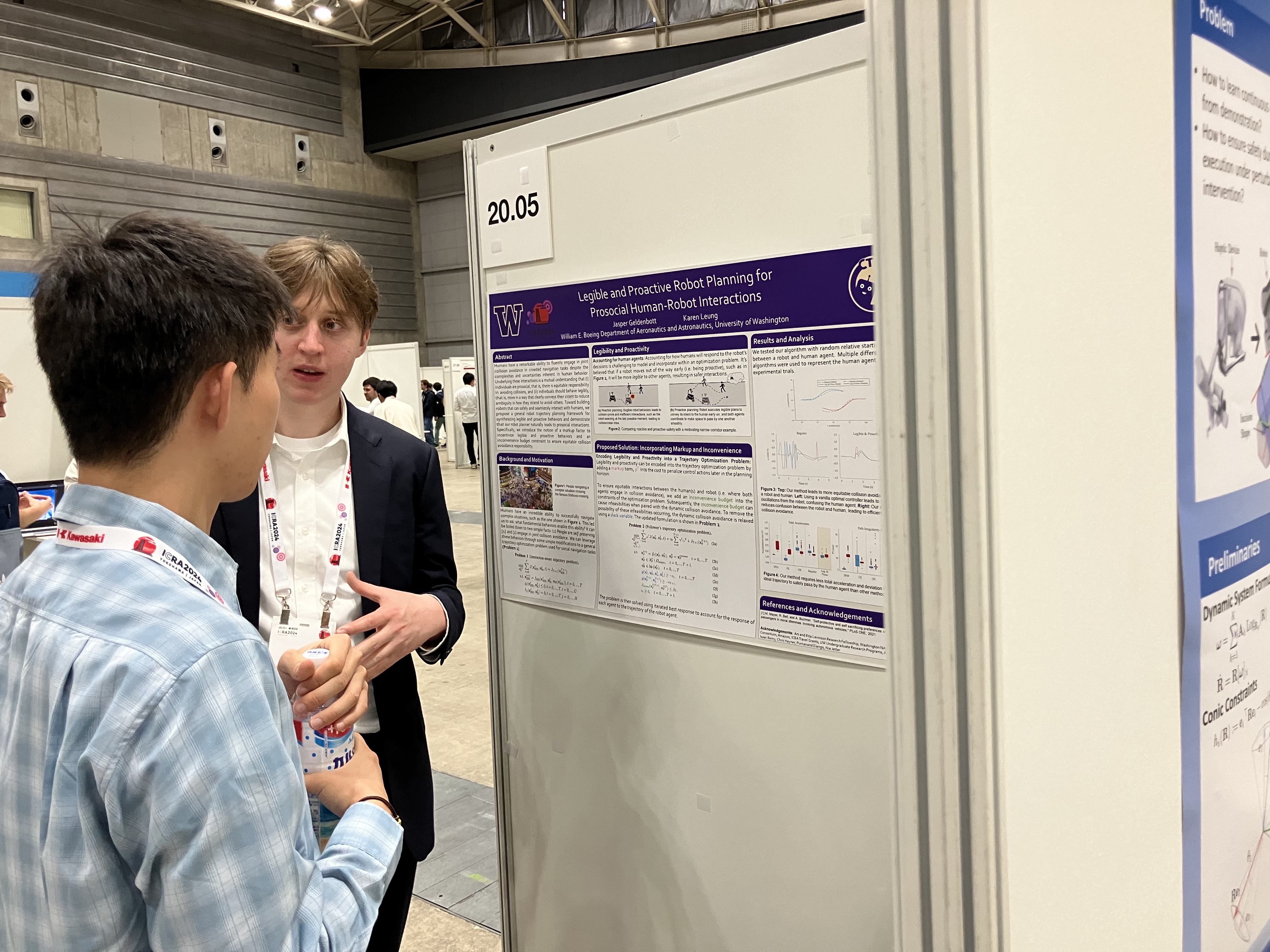
Jasper Geldenbott presented his work on proactive and legible robot planning for prosocial human-robot interactions.
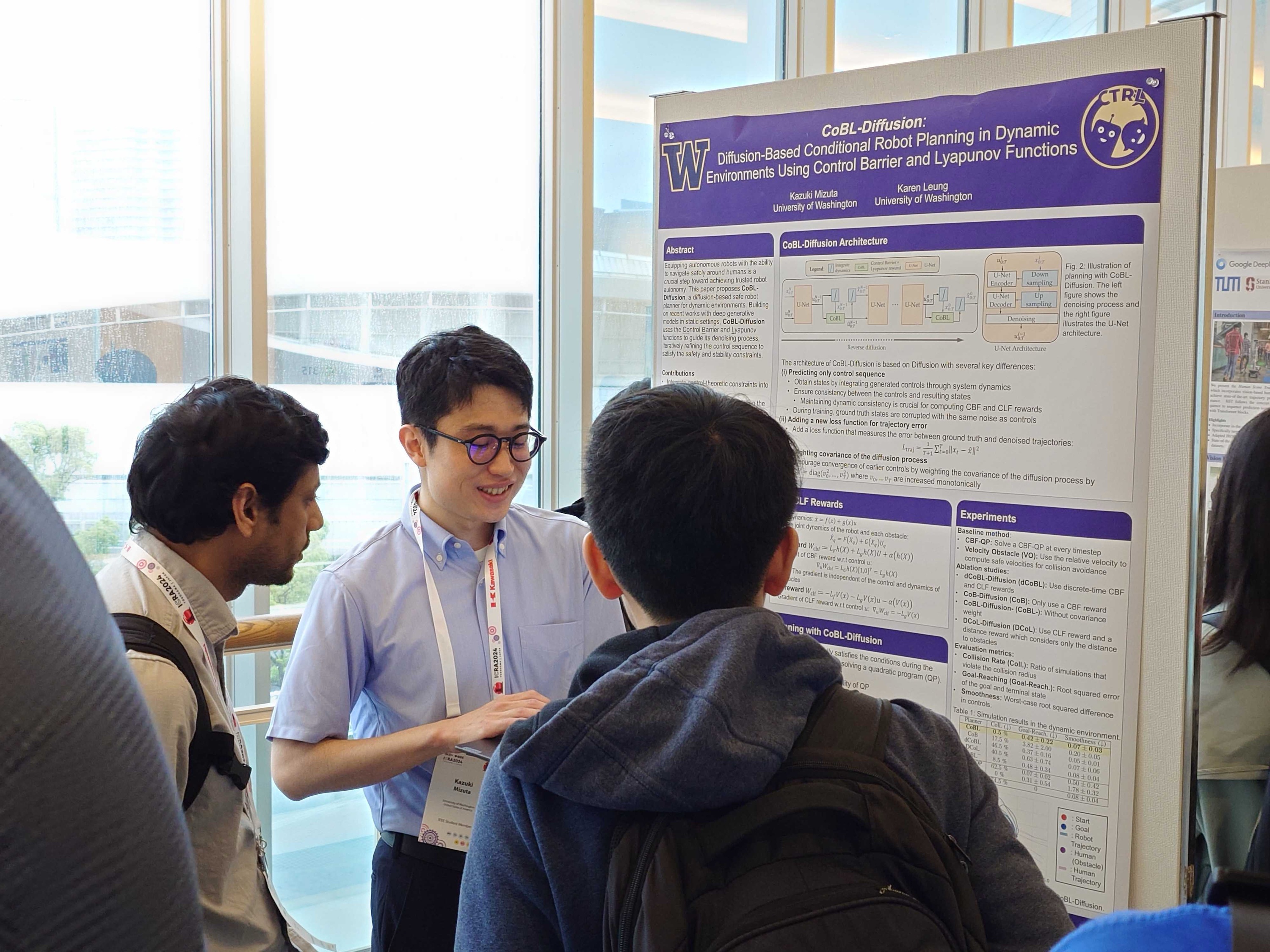
Kazuki Mizuta present his work on safe robot planner based on a diffusion model with control-theoretic tools.


Related news
- Professor Karen Leung received NSF CAREER Award
- Lab Members Rack Up Prestigious Fellowships!
- CTRL members receive A&A Student Excellence Award!
- Chris Hayner receives NSTGRO Fellowship
- Welcome Caleb Chang!
- Alex Zhang presents at CVPR 2025!
- CTRL members win A&A Department SHARC Week Research Showcase
- CTRL members at the Undergraduate Research Symposium
- IROS 2024 paper acceptance
- CTRL at research symposiums!
- CTRL members at ICRA 2024!
- Engineering Discovery Days 2024
- CTRL attends Northwest Robotics Symposium 2024
- ICRA 2024 participation
- CTRL presents their work at the JCATI Symposium
- CTRL members at NeurIPS and SciTech!
- CTRL members win A&A Department SHARC Week Research Showcase
- Kazuki Mizuta receives Doctoral Research Excellence Award
- CTRL members win A&A Department SHARC Week Research Showcase
- CTRL members at the Undergraduate Research Symposium
- ACC 2025 paper acceptance
- IROS 2024 paper acceptance
- Jasper Geldenbott receives Undergraduate Research Excellence Award
- CTRL at research symposiums!
- CTRL members at ICRA 2024!
- Engineering Discovery Days 2024
- CTRL attends Northwest Robotics Symposium 2024
- ICRA 2024 participation
- Annika Singh receives a Mary Gates Research Scholarship
- Jasper Geldenbott receives a Levinson Emerging Scholars Award
- CTRL members presenting at WA NASA Space Grant SURP Research Symposium
- RSS paper acceptance
- ICRA & ACC paper acceptances!
- Seed funding from Amazon Science Hub