RSS paper acceptance
New paper accepted to RSS 2023. Joint work with Pasquale Antonate as part of his internship at NVIDIA Research.
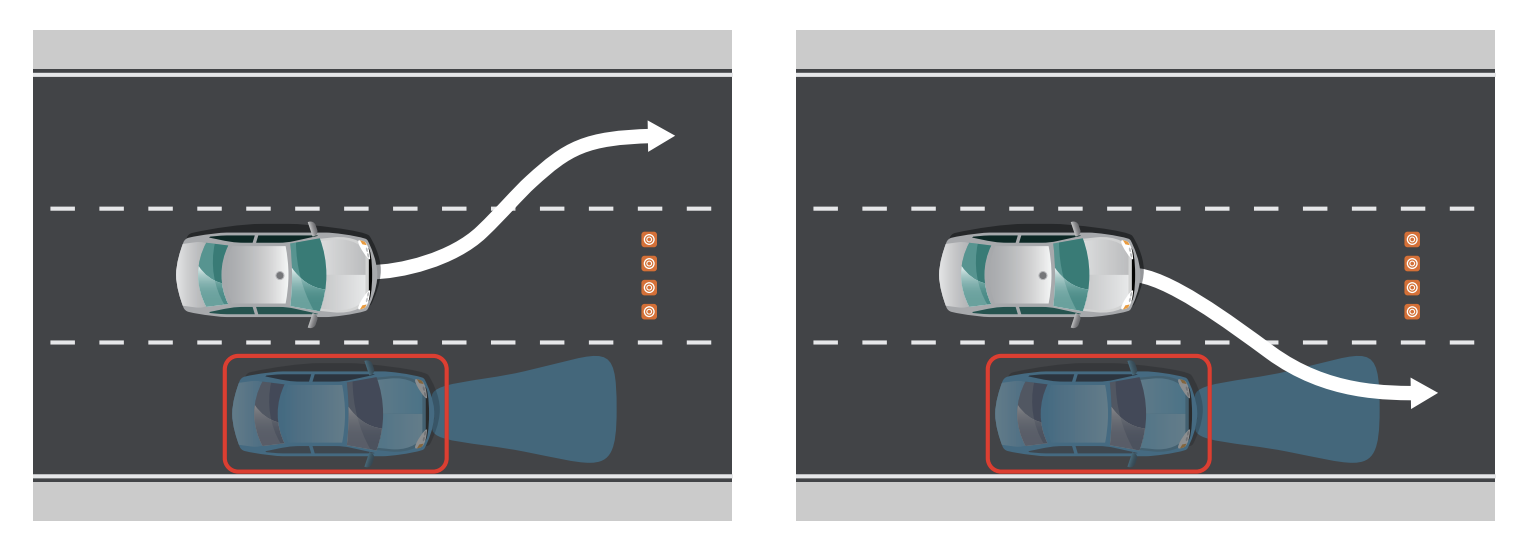
Antonante, P., Veer, S., Leung, K., Weng, X., Carlone, L., and Pavone, M., Task-Aware Risk Estimation of Perception Failures for Autonomous Vehicles
, In Robotics: Science and Systems, 2023
Not all perception failures are equally bad; how to quantify the risk associated with different perception failures for self-driving cars?
arxiv
Not all perception failures are equally bad; how to quantify the risk associated with different perception failures for self-driving cars?
arxiv
Related news
- Kazuki Mizuta receives Doctoral Research Excellence Award
- CTRL members win A&A Department SHARC Week Research Showcase
- CTRL members at the Undergraduate Research Symposium
- ACC 2025 paper acceptance
- IROS 2024 paper acceptance
- Jasper Geldenbott receives Undergraduate Research Excellence Award
- CTRL at research symposiums!
- CTRL members at ICRA 2024!
- Engineering Discovery Days 2024
- CTRL attends Northwest Robotics Symposium 2024
- ICRA 2024 participation
- Annika Singh receives a Mary Gates Research Scholarship
- Jasper Geldenbott receives a Levinson Emerging Scholars Award
- CTRL members presenting at WA NASA Space Grant SURP Research Symposium
- RSS paper acceptance
- ICRA & ACC paper acceptances!
- Seed funding from Amazon Science Hub