ICRA & ACC paper acceptances!
We have four papers recently accepted to ICRA 2023 and ACC 2023! See our publication list for more details!

Leung, K., Veer, S., Schmerling, E., and Pavone, M., Learning Autonomous Vehicle Safety Concepts from Demonstrations, In American Control Conference, 2023
How can autonomous vehicles evaluate safety without being too overly conservative?
arxiv
How can autonomous vehicles evaluate safety without being too overly conservative?
arxiv
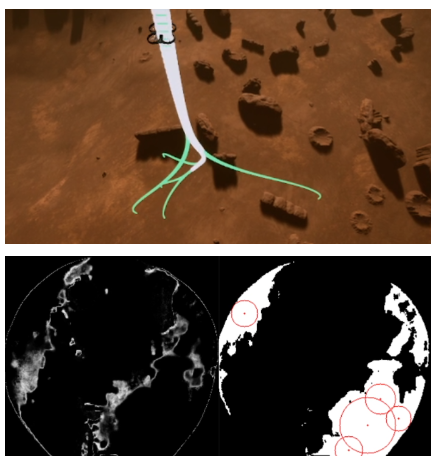
Hayner, C. R.*, Buckner, S. C.*, Broyles, D., Madewell, E., Leung, K., and Açıkmeşe, B., HALO: Hazard-Aware Landing Optimization for Autonomous Systems, In Proc. IEEE Conf. on Robotics and Automation, 2023
How can autonomous aerial systems safely and robustly land in unknown environments?
arxiv
How can autonomous aerial systems safely and robustly land in unknown environments?
arxiv
Veer, S., Leung, K., Cosner, R., Chen, Y., and Pavone, M., Receding Horizon Planning with Rule Hierarchies for Autonomous Vehicles, In Proc. IEEE Conf. on Robotics and Automation, 2023
How can autonomous vehicles intelligently prioritize road rules if not all of them can be obeyed at the same time?
arxiv
How can autonomous vehicles intelligently prioritize road rules if not all of them can be obeyed at the same time?
arxiv
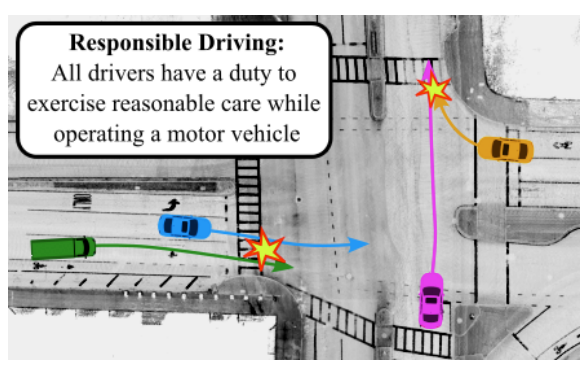
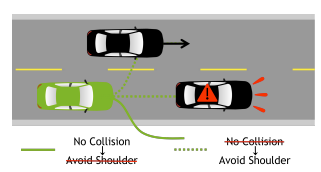
Cosner, R., Chen, Y., Leung, K., and Pavone, M., Learning Responsibility Allocations for Safe Human-Robot Interaction with Applications to Autonomous Driving, In Proc. IEEE Conf. on Robotics and Automation, 2023
How can we learn how much drivers assume responsibility for ensuring safety in various traffic settings?
arxiv
How can we learn how much drivers assume responsibility for ensuring safety in various traffic settings?
arxiv
Related news
- Kazuki Mizuta receives Doctoral Research Excellence Award
- CTRL members win A&A Department SHARC Week Research Showcase
- CTRL members at the Undergraduate Research Symposium
- ACC 2025 paper acceptance
- IROS 2024 paper acceptance
- Jasper Geldenbott receives Undergraduate Research Excellence Award
- CTRL at research symposiums!
- CTRL members at ICRA 2024!
- Engineering Discovery Days 2024
- CTRL attends Northwest Robotics Symposium 2024
- ICRA 2024 participation
- Annika Singh receives a Mary Gates Research Scholarship
- Jasper Geldenbott receives a Levinson Emerging Scholars Award
- CTRL members presenting at WA NASA Space Grant SURP Research Symposium
- RSS paper acceptance
- ICRA & ACC paper acceptances!
- Seed funding from Amazon Science Hub