Network Control
As networks become ubiquitous in many areas of engineering, it has become of paramount importance to examine how the network and its structure effect the dynamic properties of the overall system, such as its stability, performance, and robustness, both in the random and deterministic settings. We also consider some of the more fundamental system-theoretic questions such as controllability and observability of networked systems. Our research team examines a wide range questions from theoretical point of view as well as their ramifications for systems such as multiple spacecraft formation flying, distributed robotics, UAV formations, heterogeneous dynamic networks, and more recently, in the setting of social and biological networks.
Our work in this area is focused on examining fundamental aspects of networked dynamic systems with applications to:
- networked robotics: ground, atmospheric, and space
- semi-autonomy, mixed human-autonomous networks
- security and robustness of networked systems
- influence structure on social networks
- design and analysis of energy networks
- modeling and control of biological networks
Our group not only aims to contribute to the theoretical foundations of networked dynamic systems, but also pave the way for computational approaches to understand, analyze, and synthesize dynamic networks in a number of applications of current interest.
Project Sponsors: AFOSR, ARO/MURI, NSF, DARPA
Some of our recent projects include:
Beyond Linear Consensus:
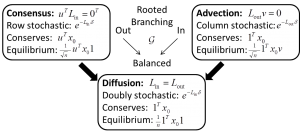
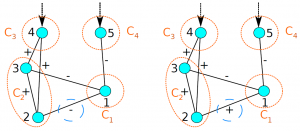
Advection on graphs: Consensus is a popular linear protocol for the network dynamics. Consequently, it is a rich area of research. We explore the advection protocol which shares many characteristics of consensus, facilitating the extension of many of the consensus results to advection. The advection protocol proves advantageous to formation control and load balancing applications. We demonstrate the latter with our robotic platform.
Z-Matrix Theory: Linear consensus can also be generalized to nonlinear consensus. The Laplacian matrix, the system matrix at the heart of consensus, lives in the family of Z-matrices. Many results from nonlinear consensus generalize to nonlinear Z-matrix applications. We explore these results, which include the characterization of the set of equilibria and the establishment of asymptotic stability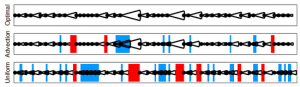
Select Publications:
- Airlie Chapman, Eric Schoof and Mehran Mesbahi (2012) Advection on Networks with an Application to Decentralized Load Balancing, 2680-2681. In Proc. of the IEEE International Conference on Intelligent Robots and Systems.
- Airlie Chapman and Mehran Mesbahi (2011) Advection on Graphs, 1461-1466. In Proc. of the IEEE Conference on Decision and Control.
- Airlie Chapman and Mehran Mesbahi (2012) Cartesian products on Z-Matrix networks: Factorization and interval analysis. In 20th International Symposium on Mathematical Theory of Networks and Systems. Slides
- Airlie Chapman and Mehran Mesbahi (2012) Stability Analysis of Nonlinear Networks via M-matrix Theory: Beyond Linear Consensus, 6626-6631. In Proc. of the American Control Conference. Slides
Controllability and Observability
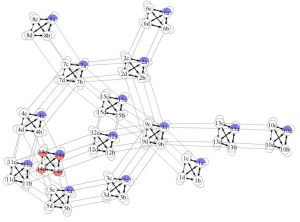
Cartesian and Kronecker Products: We investigate the Cartesian and Kronecker product of a graph and demonstrate both to be special graph products that decomposes both the network topology and network dynamics. Moreover, we are able to perform this task efficiently. We employ this decomposition to present large semi-autonomous networks as smaller factor semi-autonomous networks. New tools for network trajectory factorization, controllability and observability follow from the Cartesian and Kronecker product factorization.
Structural Controllability: Structural controllability establishes generic (weak) and complete (strong) controllability of a network based solely on the direct coupling between nodes. This is irrespective of the magnitude of these couplings. We provide necessary and sufficient conditions for strong structural controllability involving constrained matchings over the upartite graph representation of the network.
Select Publications:
- Airlie Chapman, Marzieh Nabi-Abdolyousefi and Mehran Mesbahi (2014) “Controllability and Observability of Network-of-Networks via Cartesian Products”. In IEEE Transactions on Automatic Control. (to appear)
- Airlie Chapman and Mehran Mesbahi (2014) Kronecker Product of Networked Systems and their Approximates, 1426-1431. In 21st International Symposium on Mathematical Theory of Networks and Systems. Slides
- Airlie Chapman, Marzieh Nabi-Abdolyousefi and Mehran Mesbahi (2012) Controllability and Observability of Cartesian Product Networks, 80-85. In Proc. of the IEEE Conference on Decision and Control. (Invited Paper) Slides
- Airlie Chapman and Mehran Mesbahi (2013) “Security and Infiltration of Networks: A Structural Controllability and Observability Perspective”. In Springer’s Lecture Notes on Control and Information Sciences. (to appear)
- Airlie Chapman and Mehran Mesbahi (2013) On Strong Structural Controllability of Networked Systems: A Constrained Matching Approach, 6141-6146. In Proc. of the American Control Conference. Slides
Network-of-Networks
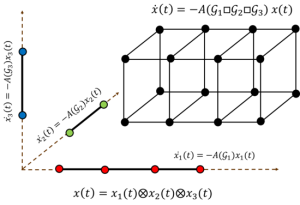
Scalability is a common challenge to modeling large networks. There are many graph based tools that can be exploited to factorize the network interaction topology, but the network interaction dynamics can rarely be decomposed in the same manner. We explore network-of-networks that exhibit this property.
Select Publications:
- Airlie Chapman, Marzieh Nabi-Abdolyousefi and Mehran Mesbahi (2014) “Controllability and Observability of Network-of-Networks via Cartesian Products”. In IEEE Transactions on Automatic Control. (to appear)
- Airlie Chapman and Mehran Mesbahi (2014) Kronecker Product of Networked Systems and their Approximates, 1426-1431. In 21st International Symposium on Mathematical Theory of Networks and Systems. Slides
- Airlie Chapman, Marzieh Nabi-Abdolyousefi and Mehran Mesbahi (2012) Controllability and Observability of Cartesian Product Networks, 80-85. In Proc. of the IEEE Conference on Decision and Control. (Invited Paper) Slides
- Airlie Chapman and Mehran Mesbahi (2012) Cartesian products on Z-Matrix networks: Factorization and interval analysis. In 20th International Symposium on Mathematical Theory of Networks and Systems. Slides
Semi-Autonomous Consensus
Network Measures and Adaptive Topology:

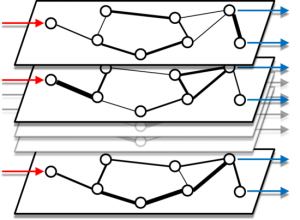
We investigate network measures to quantify the effectiveness of the control interfaces with the network, and in particular the average quadratic performance cost (the mean tracking measure) and the open loop  norm (the variance damping measure) of the network dynamics. In fact, when the network dynamics is diffusive, both measures provide a means of relating topological features of the interaction network which promote manageability of the swarm. In situations where the interaction network topology is particularly unsuitable for effective control interfaces, an option is to redesign the network online – where this is possible, for example via the wireless nature of the interactions. In particular, the open loop norm for the network can be employed to dynamically rewire the interaction network topology improving the effectiveness of the controllers’ interface with the network.
norm (the variance damping measure) of the network dynamics. In fact, when the network dynamics is diffusive, both measures provide a means of relating topological features of the interaction network which promote manageability of the swarm. In situations where the interaction network topology is particularly unsuitable for effective control interfaces, an option is to redesign the network online – where this is possible, for example via the wireless nature of the interactions. In particular, the open loop norm for the network can be employed to dynamically rewire the interaction network topology improving the effectiveness of the controllers’ interface with the network.
UAV Swarming with Wind Gusts: Dynamic network redesign provides an approach to improve the effectiveness of the human controllers’ signal in reducing a wind gust perturbing the UAV swarm. Specifically by rewiring the interaction network topology, we are able to amplify the human controllers’ signal, to more effectively dampen the perturbation.
Select Publications:
- Airlie Chapman, Eric Schoof and Mehran Mesbahi (2013) “Distributed Online Topology Design for Disturbance Rejection”. In Proc. of the IEEE Conference on Decision and Control. (accepted)
- Airlie Chapman and Mehran Mesbahi (2013) Semi-Autonomous Consensus: Network Measures and Adaptive Trees, 19-31. In IEEE Transactions on Automatic Control 58 (1).
- Airlie Chapman and Mehran Mesbahi (2012) System Theoretic Aspects of Influenced Consensus: Single Input Case, 1505-1511. In IEEE Transactions on Automatic Control 57 (6).
- Airlie Chapman and Mehran Mesbahi (2010) Semi-Autonomous Networks: Network Resilience and Adaptive Trees, 7473-7478. In Proc. of the IEEE Conference on Decision and Control. (Invited Paper)
Other Select Publications:
- A. Awad, A. Chapman, E. Schoof, A. Narang-Siddarth, and M. Mesbahi, Time-scale separation in networks: state-dependent graphs and consensus tracking, IEEE Transactions on Network Control Systems, 2018.
- E. Schoof, A. Chapman and M. Mesbahi, Weighted Bearing-Compass Dynamics: Edge and Leader Selection, Transactions on Network Science and Engineering (in-press).
- M. Hudoba de Badyn, S. Alemzadeh, and M. Mesbahi, Controllability and Data-Driven Identification of Bipartite Consensus on Nonlinear Signed Networks, IEEE Conference on Decision and Control, 2017.