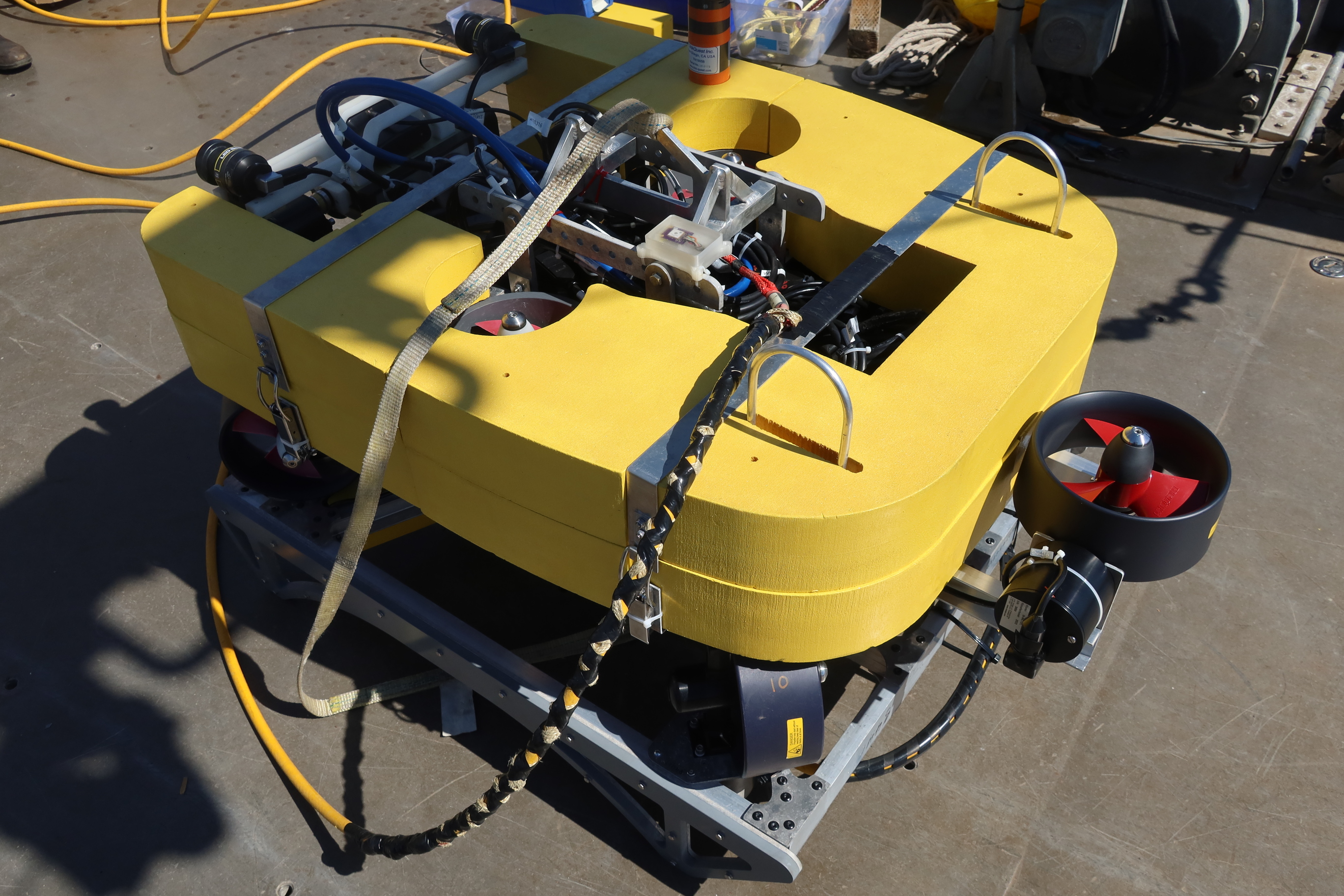
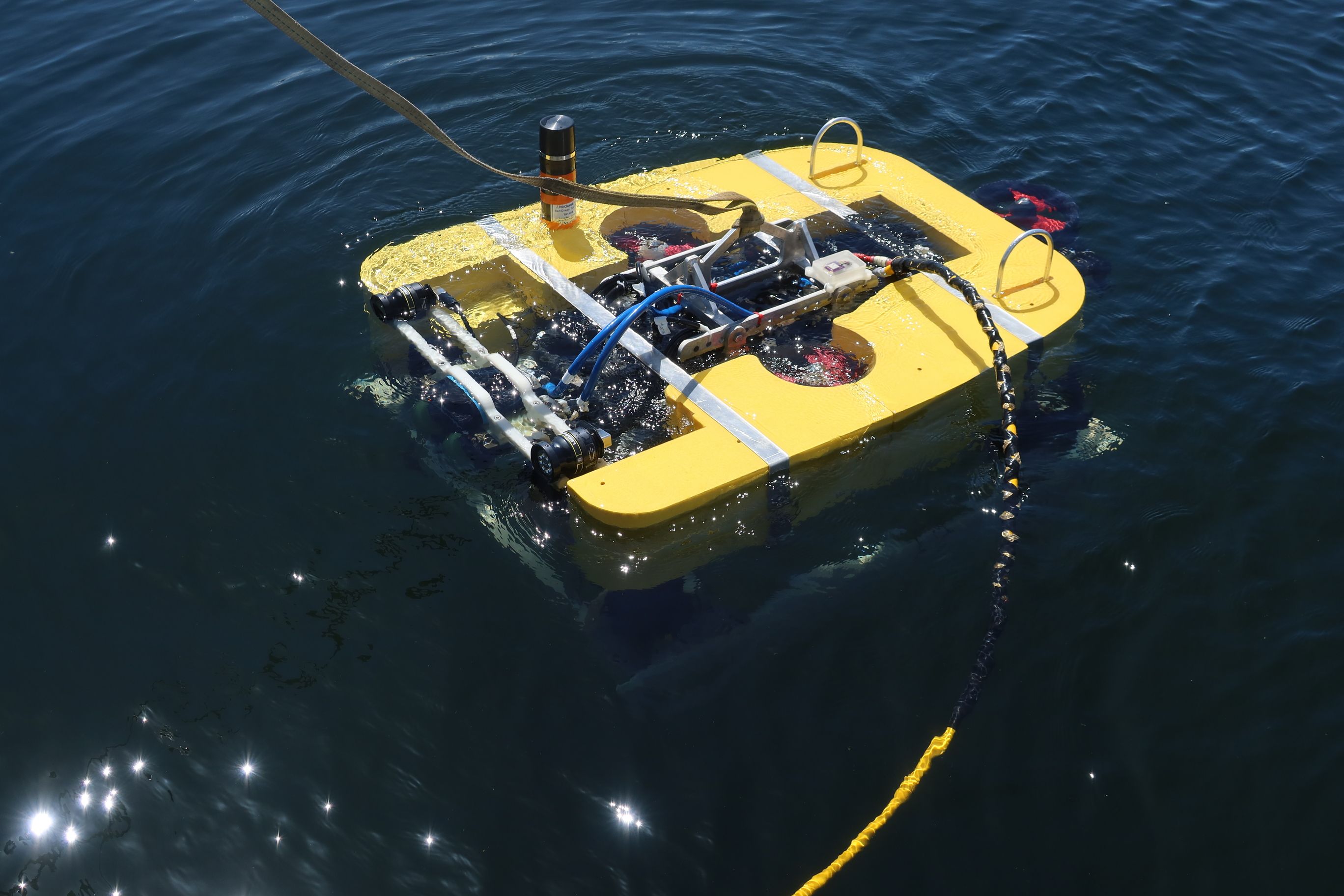
Adding an 11th Thruster the the Raven ROV
By Aaron Marburg
Preliminary testing with the Raven vehicle in the spring revealed a strong coupling between lateral motion and pitch/roll. As originally built the vehicle did not have control authority in pitch. We also realized this would limit our ability to implement whole body control when performing grasping or lifting maneuvers in the future.
To remedy this, we’ve added an 11th thruster to the stern of the vehicle. Preliminary testing shows it has lots of control authority; modifications to the control system to allow pitch and roll stabilization are in the works….