RESEARCH
Underwater Cameras
Over all of our projects, we’ve made a range of underwater camera systems.
Trisect
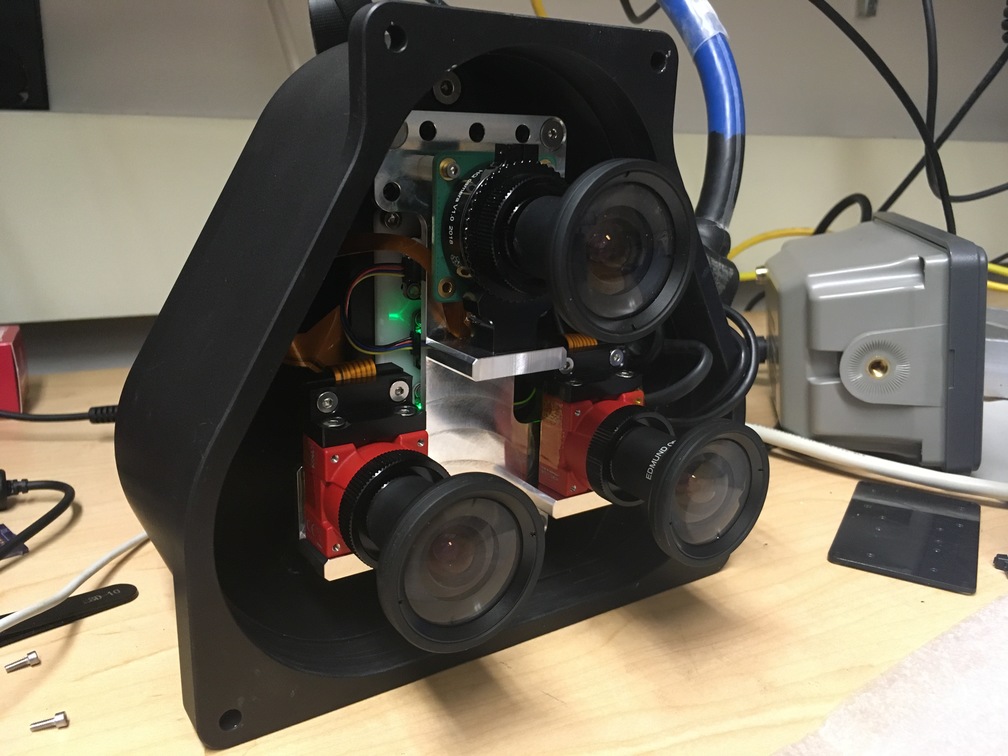
Trisect is our primary research camera. It is an Open-Source design, see the Trisect website for more details.
Subsea Odometry System
We designed this system to support the 2025 senior capstone project in partnership with the Seattle Aquarium. The team was tasked with developing a downward-looking visual odometry/SLAM system for the BlueROV.
We chose the Jetson Nano as an accessible, low cost platform for stereo processing.

More details here
BlueROV OAK-D
We’ve designed a number of systems around the OAK-D Wide camera system. Its internal image processor makes it a good match for the Raspberry Pi 4 found in the BlueROV.
We’ve focused primarily on the USB3 version of the OAK-D; though slightly more challenging to integrate (compared to the POE version), it offers greater theoretical performance.
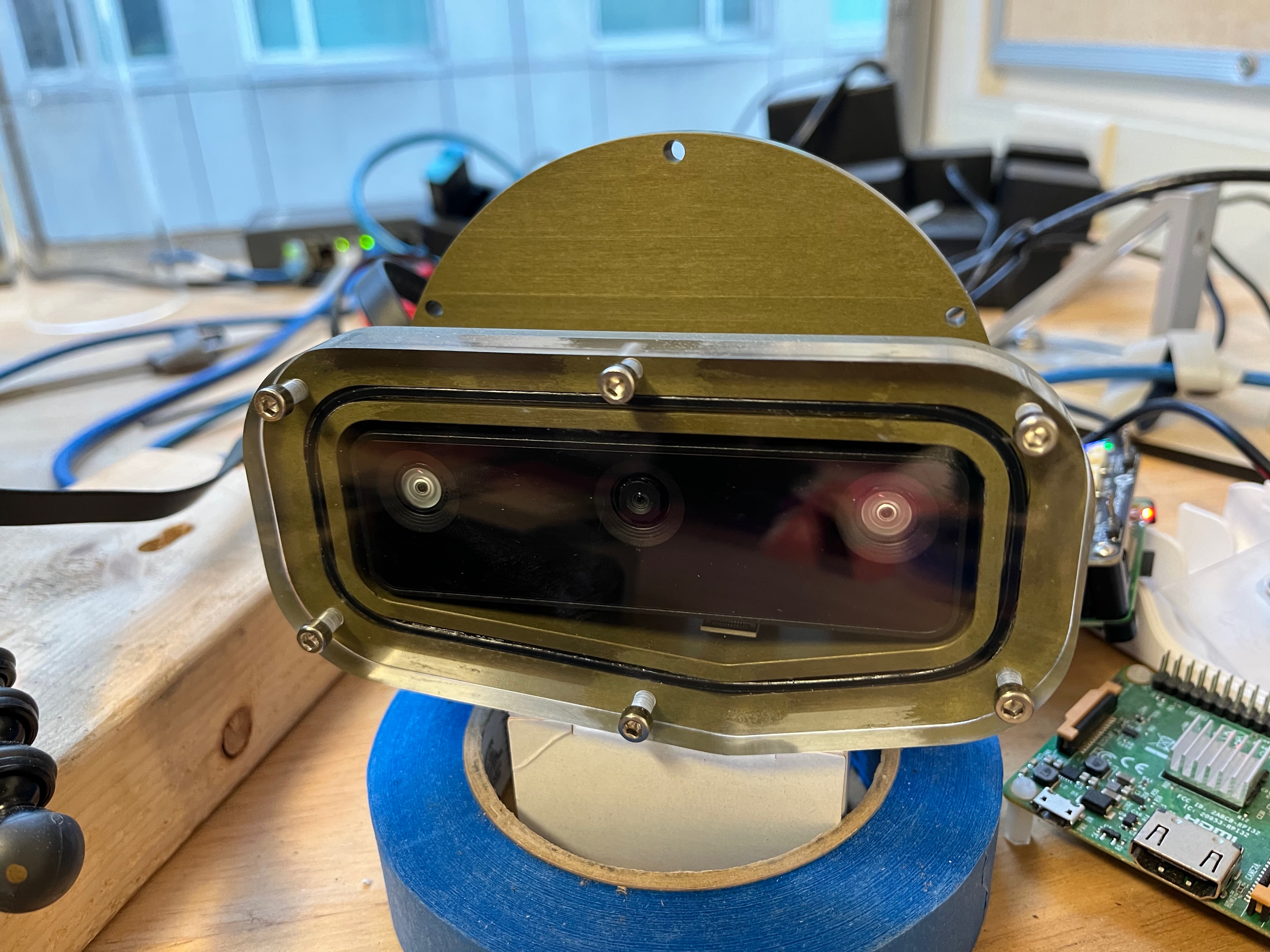
We’ve integrated the OAK-D into BlueROVs for two different projects, once as a fixed forward-looking replacement for the main BlueROV camera (above), connected to the ROV’s Pi, and once in its own housing with an independent Pi connected to the rest of the vehicle over ethernet.
Software Links
- bluerov_oakd : A customized ROS2 driver for the OAKD. Publishes the left and right raw stereo images, and publishes the color camera as an h.265 encoded RTSP stream for integration into BlueOS.
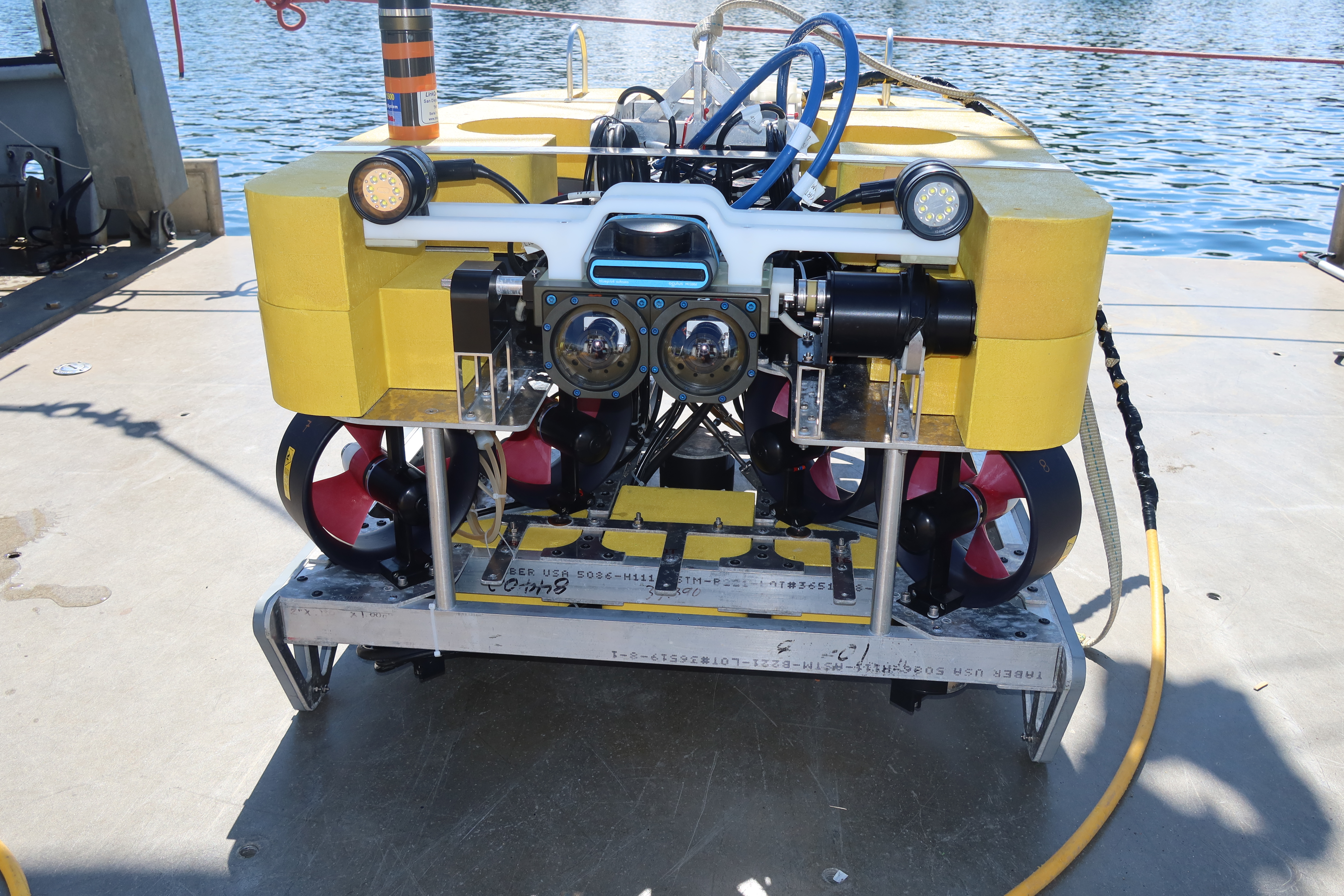
Raven Stereo Cameras
The Raven ROV has a stereo pair of Teledyne Dalsa “Genie” Gig-E cameras. Raven’s high-bandwidth fiber tether allows both cameras to have a full 1Gbps connection to the topside.
Software Links
- dalsa_gige_driver : A ROS1 driver for the Dalsa GigE-V Framework.
BSEE Cameras
For BSEE we built a set of monocoluar cameras based on the Lucid Vision Labs Triton and Phoenix machine vision cameras, and their “Arena” SDK. We’ve used these cameras in a variety of platforms, including Raven ROVs and Remus AUVs, integrated into both ROS1 and ROS2.

Software Links
- arena_camera_ros : ROS1 driver for Arena cameras.
- arena_camera_ros2 : ROS2 driver for Arena cameras.