Multimodal Robotics
From perception to action
We connect visual evidence, language, and control for reliable manipulation and embodied decision-making in physical workspaces.
The Multimodal Intelligence Lab (MILab) is a University of Washington research group based at UW Tacoma. We develop multimodal AI systems that connect perception, language, memory, reasoning, and action. Our work spans foundation models, embodied agents, robotics, mobility intelligence, public safety, and human-centered decision support.
We connect visual evidence, language, and control for reliable manipulation and embodied decision-making in physical workspaces.
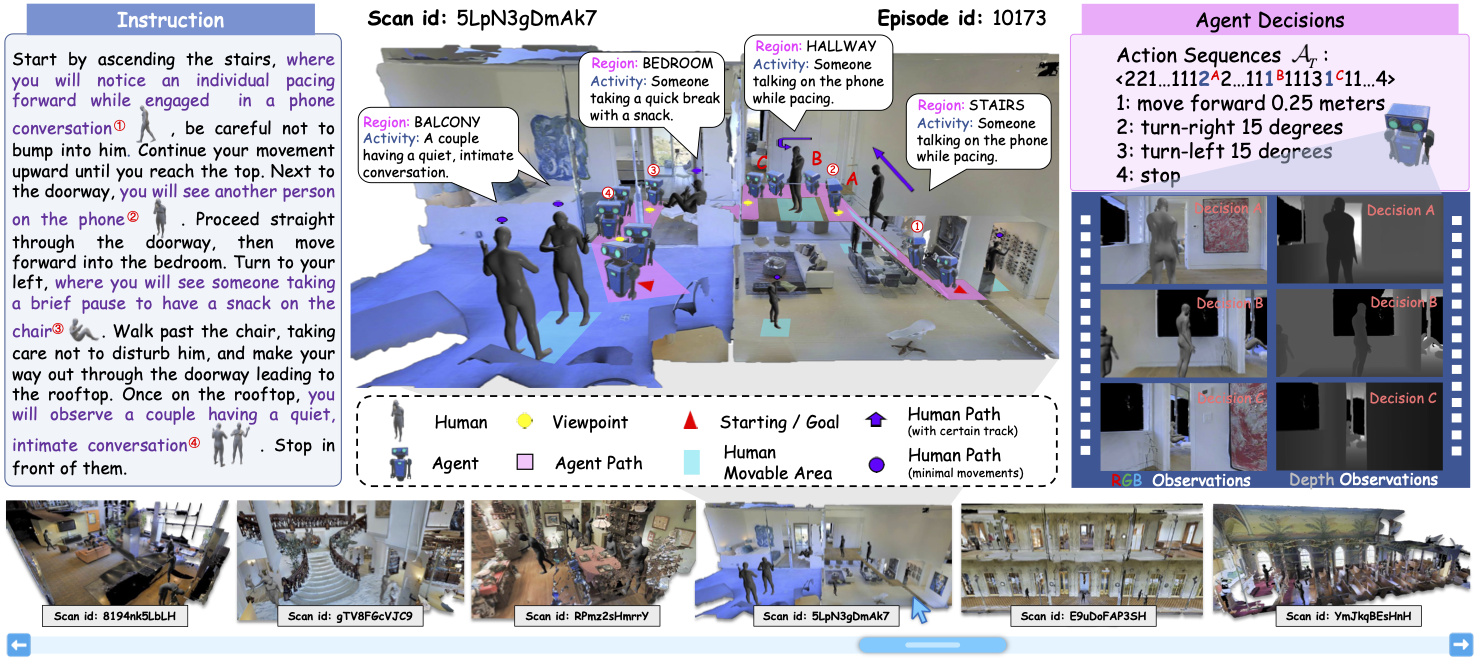
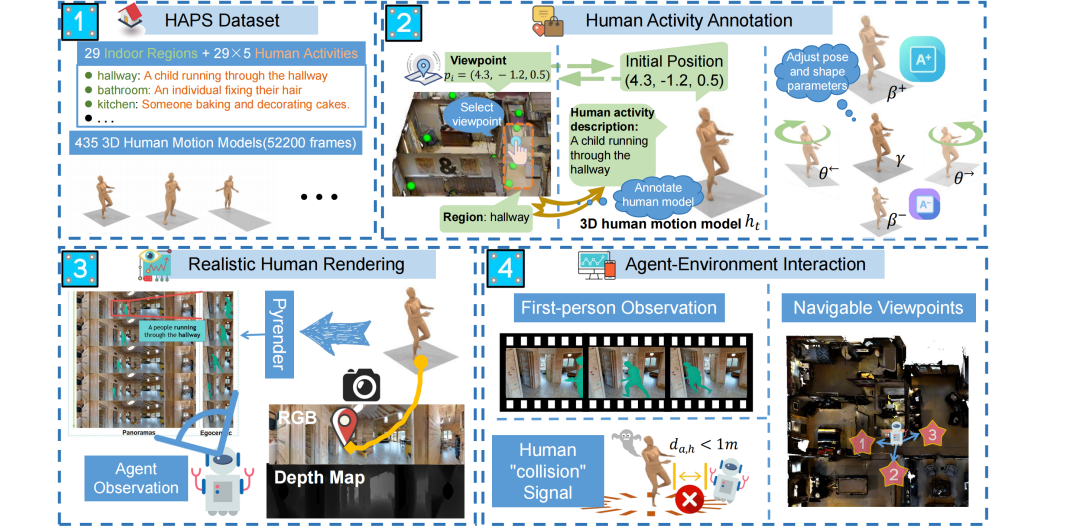
We study how agents use memory, goals, and prediction to navigate and interact in human environments over longer horizons.
We model social context and spatial evidence so AI agents can act safely around people in shared spaces.
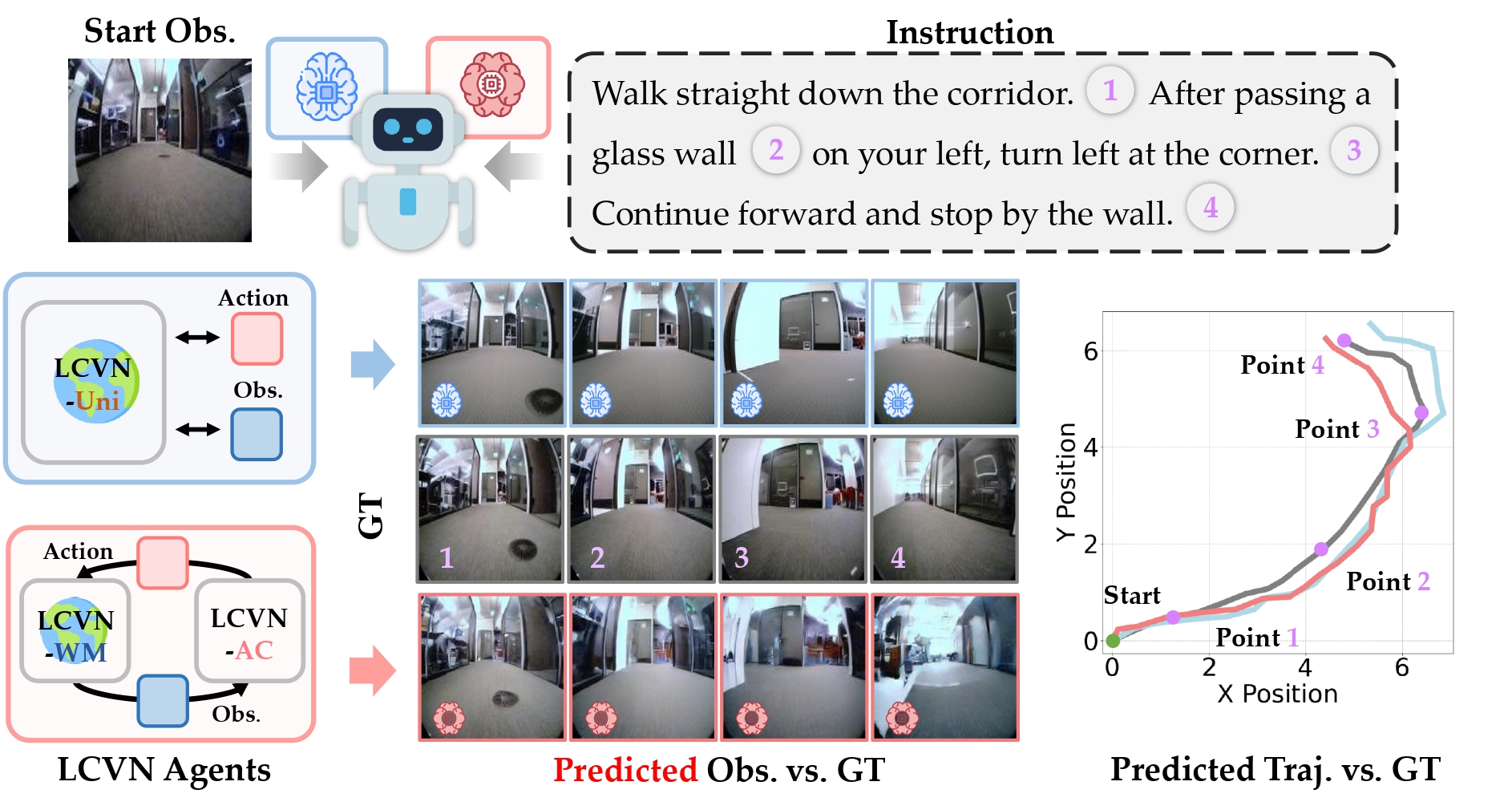
We build predictive models that connect instructions, observations, and possible future states for embodied planning.
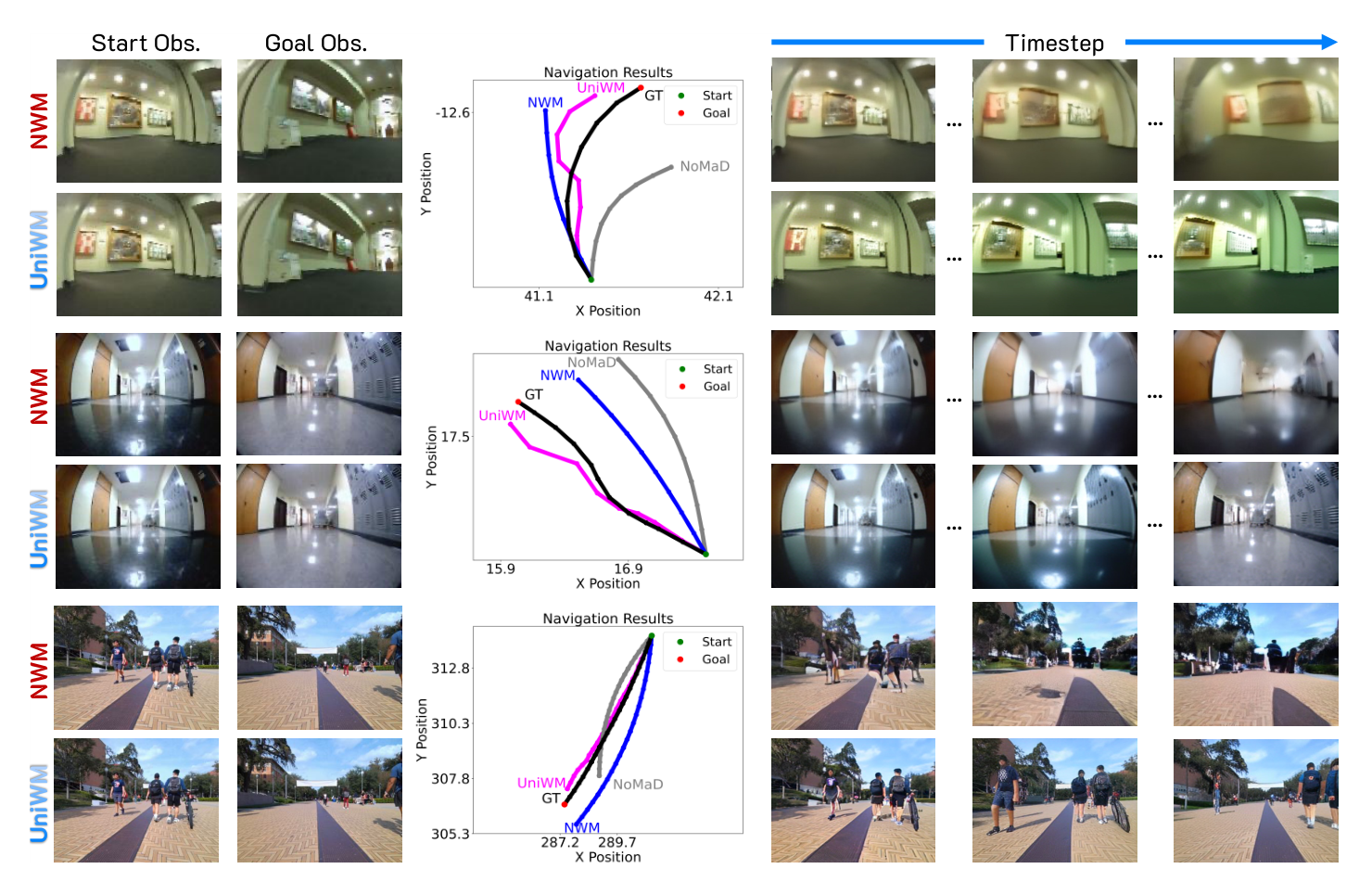
We use memory and simulation to help agents compare possible futures before acting in dynamic scenes.
We design AI systems for mobility, public safety, and secure decision support under operational constraints and risks.
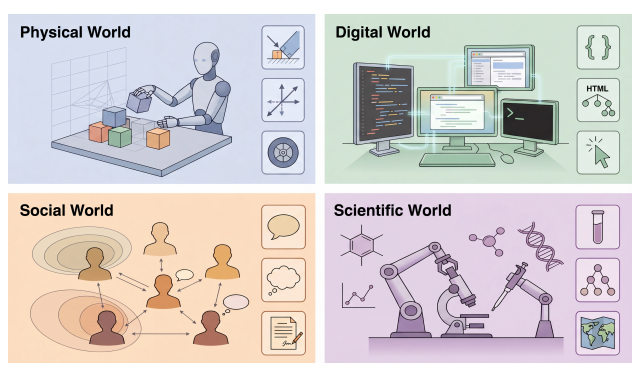
MILab connects model foundations, embodied reasoning, and deployable systems for mobility, public safety, and human-centered decision support.
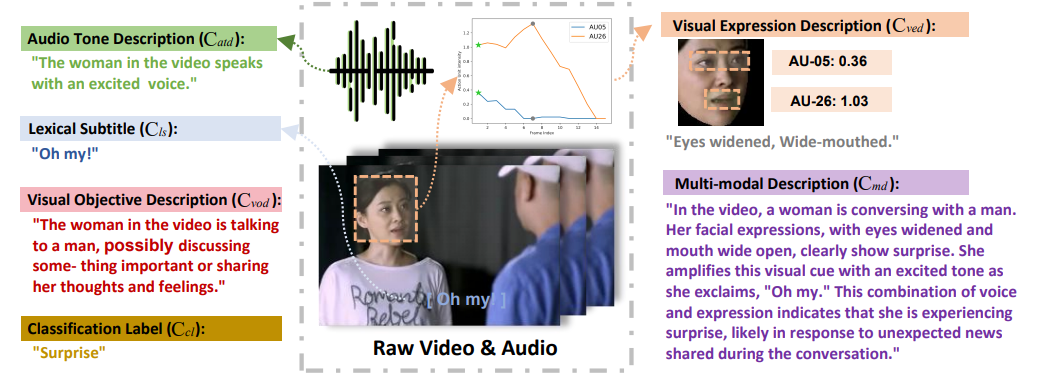
Multimodal models for perception, reasoning, learning, and generation across language, vision, video, audio, and structured signals.
Embodied agents for navigation, interaction, planning, memory, and control in human-aware physical and simulated environments.
Deployable systems for mobility, safety, sensing, monitoring, and decision-making with secure and responsible operation.
Fengyi Wu received GSFEI recognition for research excellence.
Sign-language survey and GoVIG navigation papers accepted to ACL 2026.
Lossless hierarchical decoding work accepted as an ICLR 2026 oral paper.
MaxSup, with former visiting student Yuxuan Zhou, was accepted as a NeurIPS 2025 oral paper.
Yifei Dong recognized for world-model navigation research.
Securing the Skies received Best Paper workshop recognition.
arXiv preprint, 2026
arXiv preprint, 2026
NeurIPS 2024 Spotlight
NeurIPS 2024
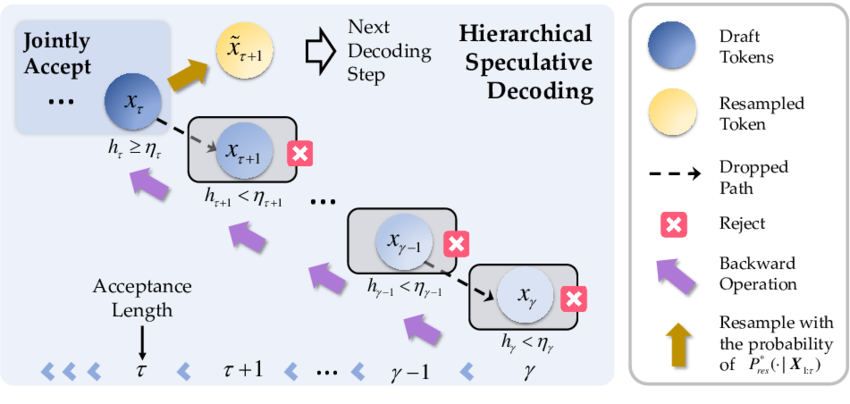
ICLR 2026 Oral
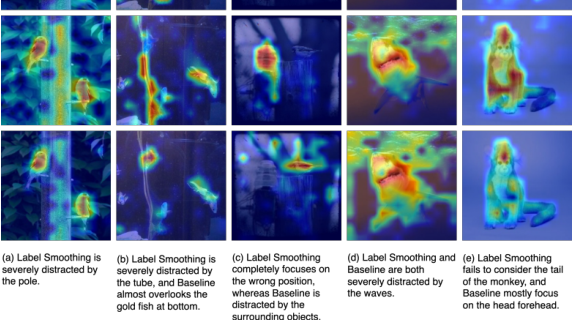
NeurIPS 2025 Oral
MILab welcomes prospective Ph.D. students, postdoctoral researchers, UW students across Seattle, Tacoma, and Bothell, and collaborators interested in multimodal AI, embodied intelligence, and deployable systems.