PLENARIES

Novel Methods for Modeling and Field-Reconstruction of Dynamic Systems with Application for Multi-task Sensing
Kok-Meng Lee
Professor, Georgia Institute of Technology, USA
Location: Room T13
Time: Tuesday, July 7, 2020, 9:00 AM-10:00 AM
Abstract
Over the past four decades, mechatronics has grown in concert with rapid advancing 4C (computer, communication, control and consumer-product) technologies through several paradigm shifts that transform 4C from room-size mainframes to desktop microprocessors, then from palms to cloud. Nowadays, intelligent mechatronics plays increasingly important roles in many emerging growth areas where more and more smart real-time functions are expected in highly complex systems involving multi-physics in small footprints; traditional lumped-parameter approaches, tedious empirical models based on point measurements, and time-demanding finite-element methods are no longer adequate to meet new challenges in this data-rich paradigm. Motivated by the needs to equip complex distributed-parameter dynamic system (DPDS) with adequate machine perception to analyze data for decision making, this talk presents a unified distributed state-variable (DSV) method for modeling a DPDS in state-space representation and reconstructing its physical fields from data, and a general framework utilizing reconstructed fields to optimize the perceptions of the DPDS enabling it to execute multiple tasks in real time simultaneously. To help visualize, the methods are illustrated in the context of metal additive-manufacturing (AM) and post-AM machining of thin-wall components, where a multi-task sensing system detects defects while conducing geometrical and material-property measurements. DSV modeling, as a bridge linking machine perception as a data-driven tool to model-based control widely known in the mechatronics community, will find a spectrum of applications (including detection of abnormalities) as well as emerging innovation where physical fields can be exploited for real-time sensing and control.
Biography
Kok-Meng Lee (kokmeng.lee@me.gatech.edu) received his M. S. and Ph. D. degrees in mechanical engineering from Massachusetts Institute of Technology in 1982 and 1985, respectively. He has been with Georgia Institute of Technology since 1985. As a Professor of mechanical engineering, his research interests include system dynamics and control, machine vision, robotics, automation and mechatronics.
Dr. Lee is founding Editor-in-Chief (EIC) for the Springer International Journal of Intelligent Robotics and Application (IJIRA). Prior to becoming IJIRA EIC, he served as EIC for the IEEE/ASME Transactions on Mechatronics (2008-2013). He co-founded the IEEE/ASME International Conference on Advanced Intelligent Mechatronics in 1997 and hosted its following edition (AIM1999) as General Chair in Atlanta, USA. He had also held representative positions in the IEEE Robotics and Automation Society; Associate Editor for its Robotics and Automation Magazine (1994-1996) and its Transactions on Robotics and Automation (1994-1998) and on Automation Science and Engineering (2003-2005). He served on the Executive Committee of ASME Dynamics Systems and Control Division (2013-2107, Chair 2016). He co-authored four books on modeling and field-based approaches for design and control of electromagnetic actuators and flexonic systems, and has held several patents on machine vision systems, ball-joint-like spherical motors, and automated systems for transferring live objects.
Dr. Lee is a Life Fellow of ASME and a Fellow of IEEE. Other recognition of his research contributions includes Presidential Young Investigator (PYI) Award, Sigma Xi Junior Faculty Award, International Hall of Fame New Technology Award, Woodruff Faculty Fellow, and Michael J. Rabins Leadership Award.

Soft robotics: from bioinspiration to new mechatronic technologies for further robotics application scenarios
Cecilia Laschi
Professor, Scuola Superiore Sant’Anna, Pisa, Italy
Location: Room T13
Time: Wednesday, July 8, 2020, 9:00 AM-10:00 AM
Abstract
Mechatronics and robotics have progressed rapidly and offered a variety of solid technologies for application in industry and beyond, ensuring proper response to a growing market. Such progress is expected to have an even higher impact in the near future, by making mechatronics and robotics pervade our daily life. Soft robotics has been contributing to this scenario in the latest years, with a perspective of rapid growth and high scientific and technological impact. Soft robotics contribution is providing robots with abilities that come from bioinspiration and build on technological challenges that feed the progress of this field. They range from insights on the use of soft and smart materials in robotics, to soft actuation and sensing technologies, modelling and control of soft robots, as well as system integration and power supply. Rethinking mechatronic components is giving life to soft robots that nicely complement the huge potential of robotics for becoming part of our lives, for responding to current societal challenges, and for contributing to economic growth.
Biography
Cecilia Laschi is Full Professor at Scuola Superiore Sant’Anna in Pisa, Italy, in the BioRobotics Institute (part of the Department of Excellence in Robotics & AI), where she serves as Deputy Director. She graduated in Computer Science at the University of Pisa in 1993 and received the Ph.D. in Robotics from the University of Genoa in 1998. In 2001-2002 she was JSPS visiting researcher at Waseda University in Tokyo. Her research interests are in the field of soft robotics, a young research area that she pioneered and contributed to develop at international level, including its applications in marine robotics and in the biomedical field. She has been working in humanoid robotics and neurorobotics, at the merge of neuroscience and robotics.
She is in the Editorial Boards of several international journals, including Science Robotics. She serves as reviewer for many journals, including Nature and Science, for the European Commission, including the ERC programme, and for many national research agencies. She is senior member of the IEEE, of the Engineering in Medicine and Biology Society (EMBS), and of the Robotics & Automation Society (RAS), where she serves as elected AdCom member and co-chairs the TC on Soft Robotics. She founded and served as General Chair for the IEEE-RAS First International Conference on Soft Robotics. She was among the founders of RoboTech srl, spin-off company of the Scuola Superiore Sant’Anna, in the sector of edutainment robotics.

Challenges and Opportunities for Robotics
Kazuhiro Kosuge
Professor, Tohoku University
Location: Room T13
Time: Thursday, July 9, 2020, 9:00 AM-10:00 AM
Abstract
We are facing global issues, such as population aging, global warming, urbanization, pandemic, etc. Many of the issues are very difficult to solve by today’s technology. We need to overcome the issues to survive through advancement of science and technology. Robotics is one of key technologies for solving the issues. In this presentation, we first consider challenges and opportunities of robotics. A robot is a system, which consists of many devices and technologies. A new robot for a new field could not be created by combining existing devices and technologies. We need to create/enrich devices/technologies to meet requirements of each field. We then discuss how the robotic foundations will be enhanced through the development of new robots in new fields. Several robot systems developed in our laboratory are introduced, which include multiple mobile-robots coordination, physical human-robot interaction, co-worker robots, universal manipulation, etc. Some of these research results have been successfully used in real applications and some of them have not been used yet. The research examples from our laboratory illustrate the issues for development of robots in new fields and importance of mechanism design for realistic robot systems.
Biography
Kazuhiro Kosuge is Distinguished Professor of Tohoku University, in the Department of Robotics, Tohoku University, Sendai, Japan. He received the B.S., M.S., and Ph.D. degrees in control engineering from Tokyo Institute of Technology in 1978, 1980, and 1988 respectively. From 1980 through 1982, he was with DENSO Co., Ltd. After having served as a Research Associate at Tokyo Institute of Technology and an Associate Professor at Nagoya University, he has been serving as a Professor at Tohoku University since 1995. For more than 35 years, he has been conducting research on robotics. He served as Science Advisor, Research Promotion Bureau, Ministry of Education, Culture, Sports, Science and Technology, Japan (2010-2014), Senior Program Officer, Japan Society of Promotion of Science (2007-2010), and Selected Fellow, Center for Research and Development Strategy, Japan Science and Technology Agency (2005-2012). He also served as IEEE Division X Director for 2015-2016, and IEEE Robotics and Automation Society President for 2010-2011. He is IEEE Fellow, JSME Fellow, SICE Fellow, RSJ Fellow, JSAE Fellow, and a member of Engineering of Academy, Japan. He is a 2018 recipient of Medal of Honor, Medal with Purple Ribbon, awarded with the name of Emperor, from the Government of Japan. He is 2020 Vice President for Technical Activities, IEEE.
KEYNOTES

Nonlinear Observer Design and Some Interesting Applications
in Autonomous Systems
Rajesh Rajamani
Professor, University of Minnesota, USA
Location: Room T13
Time: Tuesday, July 7, 2020, 11:40 AM-12:20 PM
Abstract
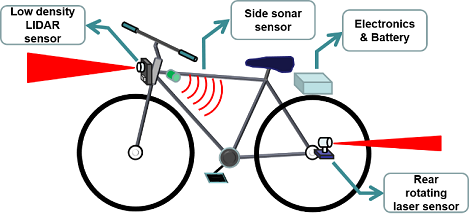
This talk centers on the theme that simple inexpensive sensors can be combined with well-designed model-based estimation algorithms to create sophisticated monitoring devices for smart mechanical systems. First, the design of stable observers for nonlinear systems is discussed and an overview of some popular design techniques is presented. Two recent nonlinear observer results are then discussed – one on a new observer design method that combines the advantages of the high-gain and LMI/LPV design algorithms and the other on the use of switched gains to provide globally stable observers for non-monotonic nonlinear systems. This is followed by presentation of practical applications involving interesting estimation problems, including a smart bicycle that automatically tracks the trajectories of nearby vehicles on the road to protect itself and smart agricultural/construction vehicles that utilize inexpensive sensors for end-effector position estimation. Videos of experimental demonstrations in these applications are presented and commercialization aspects of product prototypes are discussed.

Biography
Rajesh Rajamani obtained his M.S. and Ph.D. degrees from the University of California at Berkeley and his B.Tech degree from the Indian Institute of Technology at Madras. He joined the faculty in Mechanical Engineering at the University of Minnesota in 1998 where he is currently the Benjamin Y.H. Liu-TSI Endowed Chair Professor and Associate Director (Research) of the Minnesota Robotics Institute. His active research interests include estimation, sensing and control for smart mechanical systems.
Dr. Rajamani has co-authored over 150 journal papers and is a co-inventor on 16 patents/ patent applications. He is a Fellow of ASME and has been a recipient of the CAREER award from the National Science Foundation, the Ralph Teetor Award from SAE, the O. Hugo Schuck Award from the American Automatic Control Council, and a number of best paper awards from journals and conferences.
Several inventions from his laboratory have been commercialized through start-up ventures co-founded by industry executives. One of these companies, Innotronics, was recently recognized among the 35 Best University Start-Ups of 2016 in a competition conducted by the US National Council of Entrepreneurial Tech Transfer.

Adaptive Structure and Facades in Civil Engineering – a New Field for Intelligent Mechatronics
Oliver Sawodny
Professor, University of Stuttgart, Germany
Location: Room T14
Time: Tuesday, July 7, 2020, 11:40 AM-12:20 PM
Abstract
The building sector consumes currently more than 40 % of global resources and energy. Projecting the demand of buildings according to the increasing world population lead to significant resource problems in the near future. Therefore, increasing efficiency and reducing resources in the building sector is a crucial task. Adaptivity of the load bearing structures as well as the façade elements offers a high potential to reduce grey energy due to ultra light-weight load bearing structures respectively new ideas concerning energy reduced building elements and comfort oriented climate control. In the talk a systems engineering view on the specific problems in adaptive buildings is given. After introducing different principles to manipulate the structure of a building with actuators, the control system in the background for the active adaptation of the load bearing structure is discussed. This includes the question of sensor and actuator placement, state estimation concept, fault diagnosis and control concept for actuated buildings. In case of building elements the general problem of dramatically reduced thermal mass due to the use of light weight sandwich façade elements has to be considered for the complete climate control approach. The results will be demonstrated in a 36 m high rise multi-storey building.
Biography
Professor Sawodny received his Dipl.-Ing. degree in electrical engineering from the University of Karlsruhe, Karlsruhe, Germany, in1991 and his Ph.D. degree from the University of Ulm, Ulm, Germany, in 1996. In 2002, he became a Full Professor at the Technical University of Ilmenau, Ilmenau, Germany. Since 2005, he has been the Director of the Institute for System Dynamics, University of Stuttgart, Stuttgart, Germany. His current research interests include methods of differential geometry, trajectory generation, and applications to mechatronic systems. He received important paper awards in major control application journals such as Control Engineering Practice Paper Prize (IFAC, 2005) and IEEE Transaction on Control System Technology Outstanding Paper Award (2013). He is a senior member of IEEE and senior editor of Mechatronics.

Research on Human Kinesiology and Wearable Robot
Caihua Xiong
Professor, Huazhong University of Science and Technology, China
Location: Room T13
Time: Wednesday, July 8, 2020, 11:40 AM-12:20 PM
Abstract
How to design an artificial equipment so that its motion functions match the ones of the natural system, and forming a human-mechatronic system, is still a challenging. This presentation introduces a methodology of designing human-mechatronic integrated equipment according to the mechanisms of human limb movement. The mechanically replicating method of the human movement is explored with an example of designing a robot hand. The movement mechanisms, including the movement synergic characteristics and the kinesiology of the musculoskeletal system of the human upper extremity, are studied. A design method of an anthropomorphic hand, which endows the designed hand with natural grasping functions, is developed. The experimental results show that the designed hand can replicate not only human grasping activities of daily living but also the natural grasping behaviors of the human hand. The design principle of the rehabilitation robot is formed from the exploration of replicating mechanically the natural grasping functions of the human hand. An exoskeleton rehabilitation robot for upper extremity is developed with the similar design idea of the anthropomorphic hand. Finally, a general framework of reproducing the configuration trajectory of arm-hand in the spatiotemporal profile is proposed.
Biography
Caihua Xiong received the Ph.D. degree in mechanical engineering from Huazhong University of Science and Technology (HUST), Wuhan, China, in 1998. From 1999 to 2003, he was with the City University of Hong Kong, Chinese University of Hong Kong, as a postdoctoral fellow, and Worcester Polytechnic Institute, Worcester, MA, USA, as a Research Scientist. He is the Chang Jiang Professor appointed by the Ministry of Education of China, the owner of National Science Fund for Distinguished Young Scholars of China, and the director of the Institute of Robotics Research (IR2) in HUST. He has published more than 100 papers in some international journals such as Int. J. of Robotics Research, IEEE Trans. on Robotics, Proceedings of the Royal Society B, J. of Theoretical Biology, IEEE/ASME Trans. on Mechatronics, IEEE Trans. on Cybernetics, IEEE Trans. on Automation Science and Engineering and etc. He was authorized more than 30 invention patents related to rehabilitation robots and robotic prosthetic hands. His current research interests include the natural movement in creatures and its mechanical replication principle, wearable robotics, and rehabilitation robotics.

Making Better Sense Out of Mechanical Contacts
Soo Jeon
Associate Professor, University of Waterloo, Canada
Location: Room T14
Time: Wednesday, July 8, 2020, 11:40 AM-12:20 PM
Abstract
Estimation of mechanical properties such as weight, 3D shape or stiffness distribution requires gathering data through mechanical contacts, often in a sequential way. Applications abound in industry, and each application poses unique technical challenges in terms of how to collect and process the data for desired objectives. This talk will overview some of recent projects that fall within this category and illustrate how we drew on signal processing and statistical inference to address practical issues associated with them. Applications to be covered include distributed weight estimation for logistics, elastography for portable ultrasound, precision airdrop for UAVs (Unmanned Aerial Vehicles) and tactile exploration with robotic hand for shape and stiffness estimation of 3D object. While linear methods (e.g. recursive least square (RLS) or sparse reconstruction) can still be effective for many applications, estimation of more complex entities (e.g. velocity field, 3D shape or stiffness distribution) suggests nonlinear data-driven approaches such as Gaussian process regression (GPR) combined with active sampling strategies for sample efficiency. For each case, key issues and attempted solutions will be presented followed by performance evaluation.
Biography
Soo Jeon received his BS and MS degrees from Mechanical & Aerospace Engineering at Seoul National University, Korea in 1998 and 2001 respectively, and his PhD from Mechanical Engineering at University of California, Berkeley in 2007. After graduation, he worked as a mechanical engineer in Applied Materials Inc. until he moved to Department of Mechanical & Mechatronics Engineering at University of Waterloo in 2009 where he is currently an associate professor. His research interests include dynamic systems and control, mechatronic system design, friction-induced stability and machine learning for physical systems. Applications of his research cover robotics, industry automation, medical ultrasound, and transportation systems. He received Rudolf Kalman Best Paper Award from ASME Dynamic Systems and Control Division in 2010, and Discovery Accelerator Supplement Award from NSERC (Natural Sciences and Engineering Research Council) of Canada in 2015. He is a member of ASME, IEEE, CSME (Canadian Society for Mechanical Engineering) and PEO (Professional Engineers Ontario). He has been an associate editor for ASME Journal of Dynamic Systems, Measurement and Control, IEEE Transactions on Automation Science and Engineering, and IEEE/ASME Transactions on Mechatronics (Guest Associate Editor).